Cauchy–Euler equation
In mathematics, a Cauchy–Euler equation (also known as the Euler–Cauchy equation, or simply Euler's equation) is a linear homogeneous ordinary differential equation with variable coefficients. It is sometimes referred to as an equidimensional equation. Because of the particularly simple equidimensional structure the equation can be replaced with an equivalent equation with constant coefficients which can then be solved explicitly.
The equation
Let y(n)(x) be the nth derivative of the unknown function y(x). Then a Cauchy–Euler equation of order n has the form

The substitution reduces this equation to a linear differential equation with constant coefficients. Alternatively a trial solution may be used to solve for the basis solutions.[1]


Second order – solving through trial solution

The most common Cauchy–Euler equation is the second-order equation, appearing in a number of physics and engineering applications, such as when solving Laplace's equation in polar coordinates. It is given by the equation:[1]

We assume a trial solution given by[1]

Differentiating, we have:

and

Substituting into the original equation, we have:

Or rearranging gives:

We then can solve for m. There are three particular cases of interest:
- Case #1: Two distinct roots, m1 and m2
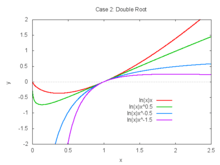
- Case #2: One real repeated root, m
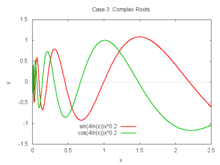
- Case #3: Complex roots, α ± βi
In case #1, the solution is given by:

In case #2, the solution is given by

To get to this solution, the method of reduction of order must be applied after having found one solution y = xm.
In case #3, the solution is given by:



For and in the real plane


This form of the solution is derived by setting x = et and using Euler's formula
Second order – solution through change of variables

We operate the variable substitution defined by


Differentiating:


Substituting , we have


This equation in can be easily solved using its characteristic polynomial

Now, if and are the roots of this polynomial, we analyze the two main cases: distinct roots and double roots:


If the roots are distinct, the general solution is given by
- , where the exponentials may be complex.

If the roots are equal, the general solution is given by

In both cases, the solution may be found by setting , hence .



Hence, in the first case,
- ,

and in the second case,

Example
Given

we substitute the simple solution xα:

For xα to be a solution, either x = 0, which gives the trivial solution, or the coefficient of xα is zero. Solving the quadratic equation, we get α = 1, 3. The general solution is therefore

Difference equation analogue
There is a difference equation analogue to the Cauchy–Euler equation. For a fixed m > 0, define the sequence ƒm(n) as

Applying the difference operator to , we find that


If we do this k times, we will find that

where the superscript (k) denotes applying the difference operator k times. Comparing this to the fact that the k-th derivative of xm equals

suggests that we can solve the N-th order difference equation

in a similar manner to the differential equation case. Indeed, substituting the trial solution

brings us to the same situation as the differential equation case,

One may now proceed as in the differential equation case, since the general solution of an N-th order linear difference equation is also the linear combination of N linearly independent solutions. Applying reduction of order in case of a multiple root m1 will yield expressions involving a discrete version of ln,

(Compare with: )

In cases where fractions become involved, one may use

instead (or simply use it in all cases), which coincides with the definition before for integer m.
See also
References
- 1 2 3 Kreyszig, Erwin (May 10, 2006). Advanced Engineering Mathematics. Wiley. ISBN 978-0-470-08484-7.