Cerebellar model articulation controller
The cerebellar model arithmetic computer (CMAC) is a type of neural network based on a model of the mammalian cerebellum. It is also known as the cerebellar model articulation controller. It is a type of associative memory.[2]
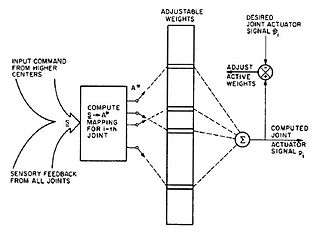
The CMAC was first proposed as a function modeler for robotic controllers by James Albus in 1975[1] (hence the name), but has been extensively used in reinforcement learning and also as for automated classification in the machine learning community. CMAC computes a function , where is the number of input dimensions. The input space is divided up into hyper-rectangles, each of which is associated with a memory cell. The contents of the memory cells are the weights, which are adjusted during training. Usually, more than one quantisation of input space is used, so that any point in input space is associated with a number of hyper-rectangles, and therefore with a number of memory cells. The output of a CMAC is the algebraic sum of the weights in all the memory cells activated by the input point.


A change of value of the input point results in a change in the set of activated hyper-rectangles, and therefore a change in the set of memory cells participating in the CMAC output. The CMAC output is therefore stored in a distributed fashion, such that the output corresponding to any point in input space is derived from the value stored in a number of memory cells (hence the name associative memory). This provides generalisation.
Building blocks

In the image on the right, there are two inputs to the CMAC, represented as a 2D space. Two quantising functions have been used to divide this space with two overlapping grids (one shown in heavier lines). A single input is shown near the middle, and this has activated two memory cells, corresponding to the shaded area. If another point occurs close to the one shown, it will share some of the same memory cells, providing generalisation.
The CMAC is trained by presenting pairs of input points and output values, and adjusting the weights in the activated cells by a proportion of the error observed at the output. This simple training algorithm has a proof of convergence.[3]
It is normal to add a kernel function to the hyper-rectangle, so that points falling towards the edge of a hyper-rectangle have a smaller activation than those falling near the centre.[4]
One of the major problems cited in practical use of CMAC is the memory size required, which is directly related to the number of cells used. This is usually ameliorated by using a hash function, and only providing memory storage for the actual cells that are activated by inputs.
References
- 1 2 J.S. Albus (1975). "A New Approach to Manipulator Control: the Cerebellar Model Articulation Controller (CMAC)". In: Trans. ASME, Series G. Journal of Dynamic Systems, Measurement and Control, Vol. 97, pp. 220–233, 1975.
- ↑ J.S. Albus (1979). "Mechanisms of Planning and Problem Solving in the Brain". In: Mathematical Biosciences. Vol. 45, pp. 247293, 1979.
- ↑ Y. Wong, CMAC Learning is Governed by a Single Parameter, IEEE International Conference on Neural Networks, San Francisco, Vol. 1, pp. 1439–43, 1993.
- ↑ P.C.E. An, W.T. Miller, and P.C. Parks, Design Improvements in Associative Memories for Cerebellar Model Articulation Controllers, Proc. ICANN, pp. 1207–10, 1991.
Further reading
- Albus, J.S. (1971). "Theory of Cerebellar Function". In: Mathematical Biosciences, Volume 10, Numbers 1/2, February 1971, pgs. 25–61
- Albus, J.S. (1975). "New Approach to Manipulator Control: The Cerebellar Model Articulation Controller (CMAC)". In: Transactions of the ASME Journal of Dynamic Systems, Measurement, and Control, September 1975, pgs. 220 – 227
- Albus, J.S. (1979). "Mechanisms of Planning and Problem Solving in the Brain". In: Mathematical Biosciences 45, pgs 247–293, 1979.
External links
- The Cerebellar Model Articulation Controller (CMAC) by David Cornforth 2007, University of NSW, Australian Defence Force Academy, Australia.