Quadcopter


A quadcopter, also called a quadrotor helicopter or quadrotor,[1] is a multirotor helicopter that is lifted and propelled by four rotors. Quadcopters are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is generated by a set of rotors (vertically oriented propellers).
Quadcopters generally use two pairs of identical fixed pitched propellers; two clockwise (CW) and two counter-clockwise (CCW). These use independent variation of the speed of each rotor to achieve control. By changing the speed of each rotor it is possible to specifically generate a desired total thrust; to locate for the centre of thrust both laterally and longitudinally; and to create a desired total torque, or turning force.[2]
Quadcopters differ from conventional helicopters which use rotors which are able to vary the pitch of their blades dynamically as they move around the rotor hub. In the early days of flight, quadcopters (then referred to either as 'quadrotors' or 'helicopters') were seen as possible solutions to some of the persistent problems in vertical flight; torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles.[3] However, early prototypes suffered from poor performance,[3] and latter prototypes required too much pilot work load, due to poor stability augmentation[4] and limited control authority.
In the late 2000s, advances in electronics allowed the production of cheap lightweight flight controllers, accelerometers (IMU), global positioning system and cameras. This resulted in a rapid proliferation of small, cheap consumer quadcopters along with other multi rotor designs. Quadcopter designs also became popular in unmanned aerial vehicle (UAV or drone) research. With their small size and maneuverability, these quadcopters can be flown indoors as well as outdoors.[1][5]
At a small size, quadcopters are cheaper and more durable than conventional helicopters due to their mechanical simplicity.[6] Their smaller blades are also advantageous because they possess less kinetic energy, reducing their ability to cause damage. For small-scale quadcopters, this makes the vehicles safer for close interaction. It is also possible to fit quadcopters with guards that enclose the rotors, further reducing the potential for damage.[7] However, as size increases, fixed propeller quadcopters develop disadvantages over conventional helicopters. Increasing blade size increases their momentum. This means that changes in blade speed take longer, which negatively impacts control. At the same time, increasing blade size improves efficiency as it takes less energy to generate thrust by moving a large mass of air at a slow speed than by moving a small mass of air at high speed. Therefore, increasing efficiency comes at the cost of control. Helicopters do not experience this problem as increasing the size of the rotor disk does not significantly impact the ability to control blade pitch.[8]
Due to their ease of construction and control, quadcopter aircraft are frequently used as amateur model aircraft projects.[9][10]
History
Early attempts
- Breguet-Richet Gyroplane (1907)
- A four-rotor helicopter designed by Louis Breguet. This was the first rotary wing aircraft to lift itself off the ground, although only in tethered flight at an altitude of a few feet. In 1908 it was reported as having flown 'several times', although details are sparse.[11]
- Oehmichen No.2 (1920)
- Etienne Oehmichen experimented with rotorcraft designs in the 1920s. Among the six designs he tried, his helicopter No.2 had four rotors and eight propellers, all driven by a single engine. The Oehmichen No.2 used a steel-tube frame, with two-bladed rotors at the ends of the four arms. The angle of these blades could be varied by warping. Five of the propellers, spinning in the horizontal plane, stabilized the machine laterally. Another propeller was mounted at the nose for steering. The remaining pair of propellers functioned as its forward propulsion. The aircraft exhibited a considerable degree of stability and increase in control-accuracy for its time, and made over a thousand test flights during the middle 1920s. By 1923 it was able to remain airborne for several minutes at a time, and on April 14, 1924 it established the first-ever FAI distance record for helicopters of 360 m (390 yd). It demonstrated the ability to complete a circular course[12] and later, it completed the first 1 kilometre (0.62 mi) closed-circuit flight by a rotorcraft.

- de Bothezat helicopter (1922)
- Dr. George de Bothezat and Ivan Jerome developed this aircraft, with six-bladed rotors at the end of an X-shaped structure. Two small propellers with variable pitch were used for thrust and yaw control. The vehicle used collective pitch control. Built by the US Air Service, it made its first flight in October 1922. About 100 flights were made by the end of 1923. The highest it ever reached was about 5 m (16 ft 5 in). Although demonstrating feasibility, it was underpowered, unresponsive, mechanically complex and susceptible to reliability problems. Pilot workload was too high during hover to attempt lateral motion.
- Convertawings Model A Quadrotor (1956)
- This unique helicopter was intended to be the prototype for a line of much larger civil and military quadrotor helicopters. The design featured two engines driving four rotors through a system of v belts. No tailrotor was needed and control was obtained by varying the thrust between rotors.[13] Flown successfully many times in the mid-1950s, this helicopter proved the quadrotor design and it was also the first four-rotor helicopter to demonstrate successful forward flight. Due to a lack of orders for commercial or military versions however, the project was terminated. Convertawings proposed a Model E that would have a maximum weight of 42,000 lb (19 t) with a payload of 10,900 lb (4.9 t) over 300 miles and at up to 173 mph (278 km/h). The Hanson Elastic Articulated (EA) bearingless rotor grew out of work done in the early 1960s at Lockheed California by Thomas F. Hanson, who had previously worked at Convertawings on the quadrotor's rotor design and control system.[14][15]
- Curtiss-Wright VZ-7 (1958)
- The Curtiss-Wright VZ-7 was a VTOL aircraft designed by the Curtiss-Wright company for the US Army. The VZ-7 was controlled by changing the thrust of each of the four propellers.
Recent developments
In the last few decades, small-scale unmanned aerial vehicles have been used for many applications. The need for aircraft with greater maneuverability and hovering ability has led to a rise in quadcopter research. The four-rotor design allows quadcopters to be relatively simple in design yet highly reliable and maneuverable. Research is continuing to increase the abilities of quadcopters by making advances in multi-craft communication, environment exploration, and maneuverability. If these developing qualities can be combined, quadcopters would be capable of advanced autonomous missions that are currently not possible with other vehicles.[16]
Some current programs include:
- The Bell Boeing Quad TiltRotor concept takes the fixed quadcopter concept further by combining it with the tilt rotor concept for a proposed C-130 sized military transport.


- The Aermatica Anteos was the first rotary wing RPAS (remotely piloted aircraft system) to obtain official permission to fly in civil airspace by the Italian Civil Aviation Authority (ENAC), and will be the first able to work in non segregated airspace, both urban and industrial.
- AeroQuad and ArduCopter are open-source hardware and software projects based on Arduino for the DIY construction of quadcopters.[17][18]
- Parrot AR.Drone is a small radio controlled quadcopter with cameras attached to it built by Parrot SA, designed to be controllable by smartphones or tablet devices.[19][20]
- Nixie is a small camera-equipped drone that can be worn as a wrist band.[21][22][23]
In July 2015, a video was posted on YouTube of an airborne quadcopter firing a pistol four times in a wooded area, sparking regulatory concerns.[24][25]
Applications
Research platform
Quadcopters are a useful tool for university researchers to test and evaluate new ideas in a number of different fields, including flight control theory, navigation, real time systems, and robotics. In recent years many universities have shown quadcopters performing increasingly complex aerial manoeuvres. Swarms of quadcopters can hover in mid-air,[26][27][28][29] fly in formations,[30][31][32][33][34] and autonomously perform complex flying routines such as flips, darting through hula hoops and organising themselves to fly through windows as a group.[35]
There are numerous advantages to using quadcopters as versatile test platforms. They are relatively cheap, available in a variety of sizes and their simple mechanical design means that they can be built and maintained by amateurs. Due to the multi-disciplinary nature of operating a quadcopter, academics from a number of fields need to work together in order to make significant improvements to the way quadcopters perform. Quadcopter projects are typically collaborations between computer science, electrical engineering and mechanical engineering specialists.[36]
Military and law enforcement
Quadcopter unmanned aerial vehicles are used for surveillance and reconnaissance by military and law enforcement agencies, as well as search and rescue missions in urban environments.[37] One such example is the Aeryon Scout, created by Canadian company Aeryon Labs,[38] which is a small UAV that can quietly hover in place and use a camera to observe people and objects on the ground. The company claims that the machine played a key role in a drug bust in Central America by providing visual surveillance of a drug trafficker's compound deep in the jungle (Aeryon won't reveal the country's name and other specifics).[39]
After a recreational quadcopter (or "drone") crashed on the White House lawn early in the morning of January 26, 2015,[40] the Secret Service began a series of test flights of such equipment in order to fashion a security protocol against hostile quadcopters.[41]
Commercial use

The largest use of quadcopters in the USA has been in the field of aerial imagery. Quadcopter UAVs are suitable for this job because of their autonomous nature and huge cost savings.[16]
In the United States, the legality of the use of remotely controlled aircraft for commercial purposes has been the source of legal issues. Raphael Pirker, a professional photographer, was fined by the FAA in 2012 for "endangering people on the ground" (a regulatory infraction) after he used a Zephyr fixed-wing drone—a "a five-pound Styrofoam model airplane"—to take aerial photos of the University of Virginia's campus in 2011.[42][43] In March 2014, a federal administrative law judge ruled in Pirker's favor, determining that his drone was a "model aircraft" and thus not subject to FAA regulations on other types of aircraft.[42] The FAA appealed to the National Transportation Safety Board; the NTSB appointed a new administrative law judge, who overturned the earlier finding and ruled that under the FAA's enabling act, the FAA had jurisdiction to regulate "any contrivance invented, used or designed to navigate, or fly in, the air," irrespective of whether it was unmanned or manned.[42] Pirker was fined $10,000, but in January 2015 settled the matter with the FAA, agreeing to pay a $1,100 fine without admitting guilt.[42] According to a report in Aviation Week, the matter "became a cause célèbre among the model aircraft and recreational and commercial small drone communities."[42]
In December 2014, the FAA released a video detailing many best practices for new drone pilots, including advisories such as keeping their machines below 400 feet and always within visual sight.[44]
In December 2013, the Deutsche Post gathered international media attention with the project Parcelcopter, in which the company tested the shipment of medical products by drone-delivery. Using a Microdrones md4-1000 quadrocopter packages were flown from a pharmacy across the Rhine River. It was the first civilian package-delivery via drones.[45][46]

As quadcopters are becoming less expensive media outlets and newspapers are using drones to capture photography of celebrities.[48]
As of March 2015, the United States created an interim policy for the legal use of unmanned aerial vehicles for commercial use where each operator can apply for an exemption filed under Section 333 with the FAA. As of August 2015 the FAA had granted over 1300 petitions to different use cases and industries.[49]
Flight dynamics
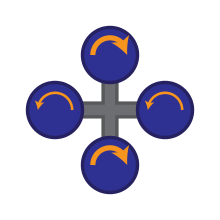
Each rotor produces both a thrust and torque about its center of rotation, as well as a drag force opposite to the vehicle's direction of flight. If all rotors are spinning at the same angular velocity, with rotors one and three rotating clockwise and rotors two and four counterclockwise, the net aerodynamic torque, and hence the angular acceleration about the yaw axis, is exactly zero, which mean there is no need for a tail rotor as on conventional helicopters. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).[50]
 | ||
| Schematic of reaction torques on each motor of a quadcopter aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control. | ||
 |
 |
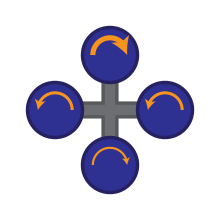 |
| A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors. | A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction. | A quadrotor adjusts its pitch or roll by applying more thrust to one rotor and less thrust to its diametrically opposite rotor. |
Coaxial configuration

In order to allow more power and stability at reduced weight, a quadcopter, like any other multirotor can employ a coaxial rotor configuration. In this case, each arm has two motors running in opposite directions (one facing up and one facing down).[51]
Vortex ring state
All quadcopters are subject to normal rotorcraft aerodynamics, including vortex ring state.[52]
Mechanical structure
The main mechanical components needed for construction are the frame, propellers (either fixed-pitch or variable-pitch), and the electric motors. For best performance and simplest control algorithms, the motors and propellers should be placed equidistant.[53] Recently, carbon fiber composites have become popular due to their light weight and structural stiffness.
The electrical components needed to construct a working quadcopter are similar to those needed for a modern RC helicopter. They are the electronic speed control module, on-board computer or controller board, and battery. Typically, a hobby transmitter is also used to allow for human input.[54]
Autonomous flight
Quadcopters and other multicopters often can fly autonomously. Many modern flight controllers use software that allows the user to mark "way-points" on a map, to which the quadcopter will fly and perform tasks, such as landing or gaining altitude.[55] The PX4 autopilot system, an open-source software/hardware combination in development since 2009, has since been adopted by both hobbyists and drone manufacturing companies alike to give their quadcopter projects flight-control capabilities. Other flight applications include crowd control between several quadcopters where visual data from the device is used to predict where the crowd will move next and in turn direct the quadcopter to the next corresponding waypoint.[56]
See also
References
- 1 2 Hoffmann, G.M.; Rajnarayan, D.G.; Waslander, S.L.; Dostal, D.; Jang, J.S.; Tomlin, C.J. (November 2004). "The Stanford Testbed of Autonomous Rotorcraft for Multi Agent Control (STARMAC)" (PDF). In the Proceedings of the 23rd Digital Avionics System Conference. Salt Lake City, UT. pp. 12.E.4/1–10.
- ↑ Stafford, Jesse (Spring 2014). "How a Quadcopter works | Clay Allen". University of Alaska, Fairbanks. Retrieved 2015-01-20.
- 1 2 Leishman, J.G. (2000). Principles of Helicopter Aerodynamics. New York, NY: Cambridge University Press.
- ↑ Anderson, S.B. (1997). "Historical Overview of V/STOL Aircraft Technology". NASA Technical Memorandum 81280.
- ↑ Büchi, Roland (2011). Fascination Quadrocopter. ISBN 978-3-8423-6731-9.
- ↑ Pounds, P.; Mahony, R.; Corke, P. (December 2006). "Modelling and Control of a Quad-Rotor Robot" (PDF). In the Proceedings of the Australasian Conference on Robotics and Automation. Auckland, New Zealand.
- ↑ Hoffman, G.; Huang, H.; Waslander, S.L.; Tomlin, C.J. (20–23 August 2007). "Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment" (PDF). In the Conference of the American Institute of Aeronautics and Astronautics. Hilton Head, South Carolina.
- ↑ Quora. "What Makes The Quadcopter Design So Great For Small Drones?". Forbes.
- ↑ "How-To: Quadrocopter based on Arduino". MAKE. Retrieved 29 December 2014.
- ↑ "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". Retrieved 29 December 2014.
- ↑ Young, Warren R. (1982). The Helicopters. The Epic of Flight. Chicago: Time-Life Books. p. 28. ISBN 0-8094-3350-8.
- ↑ "A Successful French Helicopter" Flight 24 January 1924 p47
- ↑ "1956 - 1564 - Flight Archive". flightglobal.com. Retrieved 13 March 2015.
- ↑ "Patent US3261407 - Helicopter rotor system". google.com. Retrieved 13 March 2015.
- ↑ "The Seventh International Conference on Vibration Problems ICOVP 2005". google.com. Retrieved 13 March 2015.
- 1 2 "Illumin - The Quadrotor's Coming of Age". Retrieved 29 December 2014.
- ↑ Davies, Chris (13 January 2010). "DIY Quadrocopters: Quaduino NG and AeroQuad [Videos]". SlashGear. Retrieved 4 February 2012.
- ↑ "ArduCopter 3D Robotics Quadcopter". Retrieved May 24, 2012.
- ↑ Parrot. "AR.Drone 2.0. Parrot new wi-fi quadricopter - AR.Drone.com - HD Camera - Civil drone - Parrot". Retrieved 29 December 2014.
- ↑ Bell, Donald (2013-06-22). "The democratization of the drone | Tech Culture - CNET News". News.cnet.com. Retrieved 2013-06-30.
- ↑ "Official Nixie website". Nixie. Retrieved 8 October 2014.
- ↑ Kumparak, Greg (28 September 2014). "A wearable drone that launches off your wrist to take your selfie". TechCrunch. Retrieved 11 October 2014.
- ↑ Monckton, Paul (29 September 2014). "Nixie, the wearable selfie drone". Forbes: Life. Retrieved 8 October 2014.
- ↑ Samuel Gibbs. "Drone firing handgun appears in video". the Guardian. Retrieved 20 July 2015.
- ↑ "A drone firing a gun: so this is what all the regulation is about". thestack.com. Retrieved 20 July 2015.
- ↑ Saska, M.; Vakula, J.; Preucil, L. Swarms of Micro Aerial Vehicles Stabilized Under a Visual Relative Localization. In ICRA2014: Proceedings of 2014 IEEE International Conference on Robotics and Automation. 2014.
- ↑ Saska, M. MAV-swarms: unmanned aerial vehicles stabilized along a given path using onboard relative localization. In Proceedings of 2015 International Conference on Unmanned Aircraft Systems (ICUAS). 2015
- ↑ Bennet, D. J.; McInnes, C. R. Verifiable control of a swarm of unmanned aerial vehicles. Journal of Aerospace Engineering, vol. 223, no. 7, pp. 939–953, 2009.
- ↑ Saska, M.; Chudoba, J.; Preucil, L.; Thomas, J.; Loianno, G.; Tresnak, A.; Vonasek, V.; Kumar, V. Autonomous Deployment of Swarms of Micro-Aerial Vehicles in Cooperative Surveillance. In Proceedings of 2014 International Conference on Unmanned Aircraft Systems (ICUAS). 2014.
- ↑ Saska, M.; Kasl, Z.; Preucil, L. Motion Planning and Control of Formations of Micro Aerial Vehicles. In Proceedings of The 19th World Congress of the International Federation of Automatic Control. 2014.
- ↑ Barnes, L.; Garcia, R.; Fields, M.; Valavanis, K. Swarm formation control utilizing ground and aerial unmanned systems, in IEEE/RSJ International Conference on Intelligent Robots and Systems. 2008.
- ↑ Saska, M.; Vonasek, V.; Krajnik, T.; Preucil, L. Coordination and Navigation of Heterogeneous UAVs-UGVs Teams Localized by a Hawk-Eye Approach. In Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. 2012.
- ↑ Saska, M.; Vonasek, V.; Krajnik, T.; Preucil, L. Coordination and Navigation of Heterogeneous MAV–UGV Formations Localized by a ‘hawk-eye’-like Approach Under a Model Predictive Control Scheme. International Journal of Robotics Research 33(10):1393–1412, September 2014.
- ↑ No, T.S.; Kim, Y.; Tahk, M.J.; Jeon, G.E. (2011). Cascade-type guidance law design for multiple-uav formation keeping. Aerospace Science and Technology, 15(6), 431 – 439.
- ↑ "UPenn's GRASP lab unleashes a swarm of Nano Quadrotors". Retrieved 29 December 2014.
- ↑ "Semi-Autonomous Gesture Controlled UAV Transportation System" (PDF). Retrieved 18 October 2015.
- ↑ "Armed Quadrotors Are Coming". Popular Mechanics. Retrieved 29 December 2014.
- ↑ "Aeryon Labs Inc.". Retrieved 29 December 2014.
- ↑ "Aeryon Scout Quadrotor Spies On Bad Guys From Above". Retrieved 29 December 2014.
- ↑ Los Angeles Times (26 January 2015). "Drone crashes at White House; its operator contacts Secret Service". latimes.com. Retrieved 13 March 2015.
- ↑ Secret Service Testing Drones In Bid To Defend White House, Associated Press, March 10, 2015
- 1 2 3 4 5 David Esler, FAA vs. Raphael Pirker, Aviation Week (December 28, 2015).
- ↑ David Feith, [The Drone That Shot Down the Feds], Wall Street Journal (March 24, 2014).
- ↑ "The FAA explains how to 'stay off the naughty list' with your new drone". Retrieved 2014-12-22.
- ↑ "See DHL's futuristic "parcelcopter" drone deliver packages". Retrieved 18 June 2014.
- ↑ "A prototype "parcelcopter" of German postal and logistics group Deutsche Post DHL flies in Bonn". Retrieved 18 June 2014.
- ↑ "Aerial Sunset Over Paranal". Retrieved 31 August 2015.
- ↑ "Paparazzi Agency -- We've Used Drones For A Long Time". www.tmz.com. Retrieved 29 December 2014.
- ↑ "Commercial Drone Operators in the USA".
- ↑ "Quadrotor". Retrieved 29 December 2014.
- ↑ "Multirotor Frame Configurations". Coptercraft. Retrieved 23 December 2015.
- ↑ "Quadcopter "Wobble of Death": VRS Recovery and Avoidance". YouTube. Retrieved 21 September 2014.
- ↑ Uriah. "Wyvern Quadrotor Helicopter". Retrieved 29 December 2014.
- ↑ jjdream (6 September 2010). "Quadrotor". Instructables.com. Retrieved 29 December 2014.
- ↑ "arducopter - Arduino-based autopilot for mulirotor craft, from quadcopters to traditional helis - Google Project Hosting". Code.google.com. Retrieved 2013-08-15.
- ↑ Khaleghi, Amirreza (2014). "A Comparative Study of Control Architectures in UAV/UGV - based Surveillance System" (PDF): 4.
External links
| Wikimedia Commons has media related to Quadrotors. |
- FAA UAS Model Aircraft Operations safety guidelines
- ETH Zurich Research on Quadrotors
- UPenn GRASP Laboratory
- TED Raffaello D'Andrea: The astounding athletic power of quadcopters