Unilateral contact
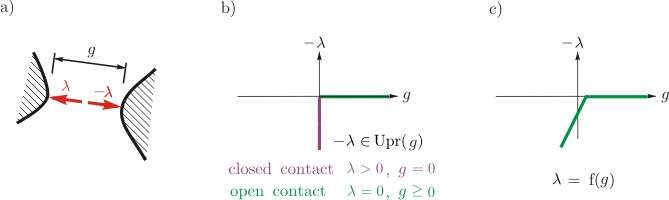
In mechanics, a unilateral contact denotes a mechanical constraint which prevents penetration between two bodies; see figure 1a. These bodies may be rigid or flexible. A unilateral contact is usually associated with a gap function g which measures the distance between the two bodies and a contact force. The behaviour of a unilateral contact is modeled by a force law which states a relation between the gap function and the contact force. Set-valued force laws of type Upr assume a hard contact and clearly distinguish between open contact (contact force equal to zero, gap g is positive) and closed contact (contact force is positive, gap g is zero), see figure 1b. Regularized force laws are associated to compliance models. These laws write the contact force as function of the gap, i.e. the models have the same underlying mathematical structure for closed and open contacts. Unilateral contacts are used in contact dynamics and/or contact mechanics.
See also
References
- Acary V., Brogliato B. Numerical Methods for Nonsmooth Dynamical Systems. Applications in Mechanics and Electronics. Springer Verlag, LNACM 35, Heidelberg, 2008.
- Brogliato B. Nonsmooth Mechanics. Communications and Control Engineering Series Springer-Verlag, London, 1999 (2dn Ed.)
- Glocker, Ch. Dynamik von Starrkoerpersystemen mit Reibung und Stoessen, volume 18/182 of VDI Fortschrittsberichte Mechanik/Bruchmechanik. VDI Verlag, Düsseldorf, 1995
- Glocker Ch. and Studer C. Formulation and preparation for Numerical Evaluation of Linear Complementarity Systems. Multibody System Dynamics 13(4):447-463, 2005
- Jean M. The non-smooth contact dynamics method. Computer Methods in Applied mechanics and Engineering 177(3-4):235-257, 1999
- Moreau J.J. Unilateral Contact and Dry Friction in Finite Freedom Dynamics, volume 302 of Non-smooth Mechanics and Applications, CISM Courses and Lectures. Springer, Wien, 1988
- Pfeiffer F., Foerg M. and Ulbrich H. Numerical aspects of non-smooth multibody dynamics. Comput. Methods Appl. Mech. Engrg 195(50-51):6891-6908, 2006
- Potra F.A., Anitescu M., Gavrea B. and Trinkle J. A linearly implicit trapezoidal method for integrating stiff multibody dynamics with contacts, joints and friction. Int. J. Numer. Meth. Engng 66(7):1079-1124, 2006
- Stewart D.E. and Trinkle J.C. An Implicit Time-Stepping Scheme for Rigid Body Dynamics with Inelastic Collisions and Coulomb Friction. Int. J. Numer. Methods Engineering 39(15):2673-2691, 1996
- Studer C. Augmented time-stepping integration of non-smooth dynamical systems, PhD Thesis ETH Zurich, ETH E-Collection, to appear 2008
- Studer C. Numerics of Unilateral Contacts and Friction -- Modeling and Numerical Time Integration in Non-Smooth Dynamics, Lecture Notes in Applied and Computational Mechanics, Volume 47, Springer, Berlin, Heidelberg, 2009