Velocity filter
A velocity filter removes interfering signals by exploiting the difference between the travelling velocities of desired seismic waveform and undesired interfering signals.
Introduction
In geophysical applications sensors are used to measure and record the seismic signals.[1][2] Many filtering techniques are available in which one output waveform is produced with a higher signal-to-noise ratio than the individual sensor recordings. Velocity filters are designed to remove interfering signals by exploiting the difference between the travelling velocities of desired seismic waveform and undesired interfering signals.[3] In contrast to the one dimensional output produced by multi-channel filtering, velocity filters produce a two-dimensional output.
Consider an array of N sensors that receive one desired and M undesired broadband interferences. Let the measurement of nth sensor be modeled by the expression:
- xn(t)= amnsm(t-Tmn)+ŋn(t)___(1)

where n=1,2,...,N; m=0,1,...,M; sm(t) are signals travelling across the array, and ŋn(t) represents zero-mean white random noise at the nth sensor, uncorellated from sensor to sensor. The parameters amn and Tmn are amplitude gain and time delays of the signal sm(t) when received at nth sensor.
Without loss of generality, we shall assume that s0(t) is the desired signal and s1(t),s2(t),...,sM(t) are the undesired interferences. Additionally we shall assume that T0n=0, and a0n =1. This essentially means that the data has been time shifted to align the desired seismic signal so that it appears on all sensors at the same time and balanced so that the desired signal appears with equal amplitudes. We assume that the signals are digitized prior to being recorded and that the length K of time sequences of recorded data is large enough for the complete delayed interfering waveforms to be included in the recorded data. In the discrete frequency domain, the nth trace can be expressed as:
- Xn(k)=S0(k) + amnSm(k)e−jwkTmn + Nn(k)___(2)

where k=0,1,...,K-1; wk=(2π/K) is the sampling angular frequency.
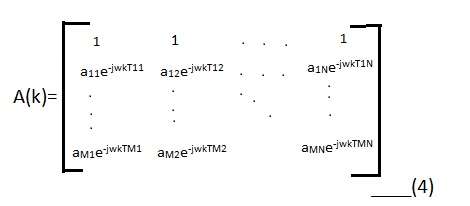
Using matrix notation, (2) can be expressed in the form:
- X(k) = A(k) S(k) + N(k)___(3)
Velocity filtering
Frequency domain multichannel filters F1(k), F2(k), ..., FN(k) can be applied to the data to produce one single output trace of the form,:[4][5]
- Y(k) = FN(k)Xn(k) ___(6)

In matrix form, the above expression can be written as:
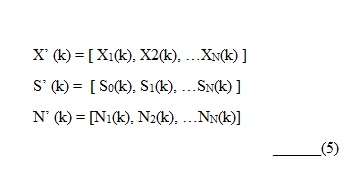
- Y(k) = X'(k)F(k) = S'(k) A'(k) F(k) + N'(k) F(k) ___(7)
where F(k) is an N x 1 vector whose elements are the individual channel filters. That is,
- F(k) = [F1(k), F2(k), ..., FN(k)] ___(8)
By following the procedure discussed in,[6][7] an optimum filter vector F(k) can be designed to attenuate, in the least square sense, the undesired coherent interferences S1(k),S2(k),...,SM(k) while preserving the desired signal S0(k) in Y(k). This filter can be shown [6],[7] to be of the form:
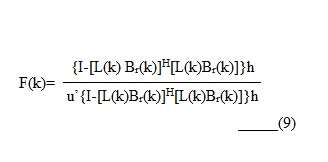
where h is an arbitrary N x 1 nonzero vector, u = [1,0,...,0], I is the unit matrix, Br(k) is a submatrix of the matrix obtained by dropping all linearly dependent rows, and L(k) is a lower triangular matrix satisfying:
- [L(k) Br(k)] [L(k) Br(k)]H = I
The multichannel processing scheme described by [6]-[11] produces one dimensional output trace. A velocity filter, on the other hand, is a two-dimensional filter which produces a two-dimensional output record.
A two-dimensional record can be generated by a procedure which involves repeatedly applying multichannel optimum filters to a small number of overlapping subarrays of the input data,.[8][9]

More specifically, let us consider a subarray of W channels, where W<<N, which slides over the input data as shown in Fig. 1. For every subarray position an optimum multichannel filter based on (9) can be designed so that the undesired interferences are suppressed from its corresponding output trace. It should be noted that in designing this filter we use W instead of N in expression (9). thus traces 1,2,...,W of the input record produce the first trace of the output record, traces K,K+1,...K+W-1 of the input record produce the Kth trace of the output record, and traces N-W+1,N-W+2,...,N of the input record produce the (N-W+1)st trace, which is the last trace, of the output record. For a large N and small W, as is typically the case in geophysical data, the output record can be viewed as comparable in dimensions to the input record. Clearly for such a scheme to work effectively W must be as small as possible; while at the same time it must be large enough to provide the necessary attenuation of the undesired signals.Note that a maximum of W-1 undesired interferences can be totally suppressed by such a scheme.[10][11]
References
- ↑ 1. J.H. Justice, "Array processing in exploration seismology", in Array Signal Processing, S.Haykin. Ed. Englewood Cliffs, NJ: Prentice-Hall, 1985, chap. 2, pp. 6-114.
- ↑ E.A.Robinson and T.S. Durrani, "Geophysical Signal Processing". Englewood Cliffs, NJ: Prentice-Hall, 1986.
- ↑ R.L.Sengbush and M.R.Foster, "Optimum multichannel velocity filters", Geophysics, vol. 33, pp. 11-35, Feb. 1968.
- ↑ M.T.Hanna and M. Simaan, "Absolutely optimum filters for sensor arrays", IEEE Trans. Acoust., Speech Signal Processing, vol. ASSP-33, pp. 1380-1386, Dec. 1985
- ↑ M.T. Hanna and M. Simaan. "Array filters for sidelobe elimination", IEEE J. Oceanic Eng., vol. OE-10, pp. 248-254, July 1985.
- ↑ C.M. Chen and M. Simaan, "Frequency-domain filters for suppression of multiple interferences on array data", in Proc. 1990 IEEE COnf. Acoust., Speech Signal Processing (Albuquerque, NM), Apr. 3-6, 1990, pp. 1937-1940.
- ↑ C.M. Chen, "Optimum multichannel filters for multiple undesired interferences on sensor arrays", Ph.D. dissert., Signal Process. Interpret. Lab., Univ. Pitsburgh. Rep. SPIL No. 91-01, 1991.
- ↑ M. Simaan and P.L. Love, "Optimum suppression of coherent signals with linear moveout in seismic data", Geophysics, vol. 49, pp. 215-226, Mar. 1984.
- ↑ M.T. Hanna and M. Simaan, "Design and implementation of velocity filters using multichannel array processing techniques", IEEE Trans. Acoust., Speech and Signal Processing, vol. ASSP-35, pp. 864-877, June 1987.
- ↑ Chih-Ming Chen and Marwan A.Simaan,"Velocity Filters for Multiple Interfaces in Two-Dimensional Geophysical Data", IEEE Trans. on geoscience and remote sensing,Vol 29.No.4,pp. 563-570, July 1991.
- ↑ Magdy T, Hanna, "Velocity Filters for multiple interference attenuation in Geophysical Array Data",IEEE Trans. on geoscience and remote sensing, Vol 26,No. 6,pp. 741-748, November 1998.