Conversion between quaternions and Euler angles
Spatial rotations in three dimensions can be parametrized using both Euler angles and unit quaternions. This article explains how to convert between the two representations. Actually this simple use of "quaternions" was first presented by Euler some seventy years earlier than Hamilton to solve the problem of magic squares. For this reason the dynamics community commonly refers to quaternions in this application as "Euler parameters".
Definition
For the rest of this article, the JPL quaternion convention shall be used. A unit quaternion can be described as:


We can associate a quaternion with a rotation around an axis by the following expression




where α is a simple rotation angle (the value in radians of the angle of rotation) and cos(βx), cos(βy) and cos(βz) are the "direction cosines" locating the axis of rotation (Euler's Theorem).
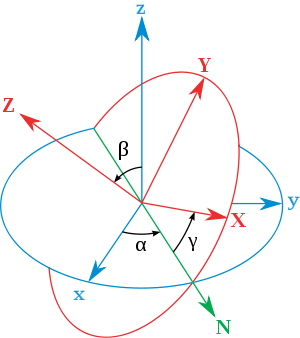
Tait–Bryan angles
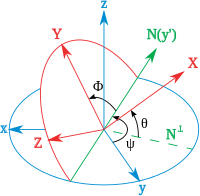
Similarly for Euler angles, we use the Tait Bryan angles (in terms of flight dynamics):
- Roll – : rotation about the X-axis
- Pitch – : rotation about the Y-axis
- Yaw – : rotation about the Z-axis



where the X-axis points forward, Y-axis to the right and Z-axis downward with angles defined for clockwise/lefthand rotation. In the conversion example above the rotation occurs in the order yaw, pitch, roll (about body-fixed axes).
Rotation matrices
The orthogonal matrix (post-multiplying a column vector) corresponding to a clockwise/left-handed (looking along positive axis to origin) rotation by the unit quaternion is given by the inhomogeneous expression:


or equivalently, by the homogeneous expression:

If is not a unit quaternion then the homogeneous form is still a scalar multiple of a rotation matrix, while the inhomogeneous form is in general no longer an orthogonal matrix. This is why in numerical work the homogeneous form is to be preferred if distortion is to be avoided.

The direction cosine matrix (from the rotated Body XYZ coordinates to the original Lab xyz coordinates for a clockwise/lefthand rotation) corresponding to a post-multiply Body 3-2-1 sequence with Euler angles (ψ, θ, φ) is given by:[1]

Euler Angles to Quaternion Conversion
By combining the quaternion representations of the Euler rotations we get for the Body 3-2-1 sequence, where the airplane first does yaw (Body-Z) turn during taxiing onto the runway, then pitches (Body-Y) during take-off, and finally rolls (Body-X) in the air. The resulting orientation of Body 3-2-1 sequence (around the capitalized axis in the illustration of Tait–Bryan angles) is equivalent to that of lab 1-2-3 sequence (around the lower-cased axis), where the airplane is rolled first (lab-x axis), and then nosed up around the horizontal lab-y axis, and finally rotated around the vertical lab-z axis (lB = lab2Body):

Other rotation sequences use different conventions.[1]
Source Code
Below code in C/C++ language illustrates above conversion that also avoids recalculating common expressions:
static Quaterniond toQuaternion(double pitch, double roll, double yaw)
{
Quaterniond q;
double t0 = std::cos(yaw * 0.5f);
double t1 = std::sin(yaw * 0.5f);
double t2 = std::cos(roll * 0.5f);
double t3 = std::sin(roll * 0.5f);
double t4 = std::cos(pitch * 0.5f);
double t5 = std::sin(pitch * 0.5f);
q.w() = t0 * t2 * t4 + t1 * t3 * t5;
q.x() = t0 * t3 * t4 - t1 * t2 * t5;
q.y() = t0 * t2 * t5 + t1 * t3 * t4;
q.z() = t1 * t2 * t4 - t0 * t3 * t5;
return q;
}
Quaternion to Euler Angles Conversion
The Euler angles can be obtained from the quaternions via the relations:[2]

Note, however, that the arctan and arcsin functions implemented in computer languages only produce results between −π/2 and π/2, and for three rotations between −π/2 and π/2 one does not obtain all possible orientations. To generate all the orientations one needs to replace the arctan functions in computer code by atan2:

Source Code
Below code in C/C++ language illustrates above conversion that also avoids recalculating common expressions:
static void toEulerianAngle(const Quaterniond& q, double& pitch, double& roll, double& yaw)
{
double ysqr = q.y() * q.y();
double t0 = -2.0f * (ysqr + q.z() * q.z()) + 1.0f;
double t1 = +2.0f * (q.x() * q.y() - q.w() * q.z());
double t2 = -2.0f * (q.x() * q.z() + q.w() * q.y());
double t3 = +2.0f * (q.y() * q.z() - q.w() * q.x());
double t4 = -2.0f * (q.x() * q.x() + ysqr) + 1.0f;
t2 = t2 > 1.0f ? 1.0f : t2;
t2 = t2 < -1.0f ? -1.0f : t2;
pitch = std::asin(t2);
roll = std::atan2(t3, t4);
yaw = std::atan2(t1, t0);
}
Singularities
One must be aware of singularities in the Euler angle parametrization when the pitch approaches ±90° (north/south pole). These cases must be handled specially. The common name for this situation is gimbal lock.
Code to handle the singularities is derived on this site: www.euclideanspace.com
Vector Rotation
Note that the canonical way to rotate a three-dimensional vector by a quaternion defining an Euler rotation is via the formula



where is a quaternion containing the embedded vector , is a conjugate quaternion, and is the rotated vector . In computational implementations this requires two quaternion multiplications. An alternative approach is to apply the pair of relations






where indicates a three-dimensional vector cross product. This involves fewer multiplications and is therefore computationally faster. Numerical tests indicate this latter approach may be up to 30% [3] faster than the original for vector rotation.

Proof
The general rule for quaternion multiplication involving scalar and vector parts is given by

Using this relation one finds for that


and upon substitution for the triple product

where anti-commutivity of cross product and has been applied. By next exploiting the property that is a unit quaternion so that , along with the standard vector identity




one obtains

which upon defining can be written in terms of scalar and vector parts as

See also
- Rotation operator (vector space)
- Quaternions and spatial rotation
- Euler Angles
- Rotation matrix
- Rotation formalisms in three dimensions
References
- 1 2 NASA Mission Planning and Analysis Division. "Euler Angles, Quaternions, and Transformation Matrices" (PDF). NASA. Retrieved 12 January 2013.
- ↑ Blanco, Jose-Luis (2010). "A tutorial on se (3) transformation parameterizations and on-manifold optimization". University of Malaga, Tech. Rep.
- ↑ https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4435132/
External links
- Q60. How do I convert Euler rotation angles to a quaternion? and related questions at The Matrix and Quaternions FAQ