Active and passive transformation
In physics and engineering, an active transformation, or alibi transformation,[1] is a transformation which actually changes the physical position of a point, or rigid body, which can be defined even in the absence of a coordinate system; whereas a passive transformation, or alias transformation,[2] is merely a change in the coordinate system in which the object is described (change of coordinate map, or change of basis). By default, by transformation, mathematicians usually refer to active transformations, while physicists and engineers could mean either.
Put differently, a passive transformation refers to description of the same object in two different coordinate systems.[3] On the other hand, an active transformation is a transformation of one or more objects with respect to the same coordinate system. For instance, active transformations are useful to describe successive positions of a rigid body. On the other hand, passive transformations may be useful in human motion analysis to observe the motion of the tibia relative to the femur, that is, its motion relative to a (local) coordinate system which moves together with the femur, rather than a (global) coordinate system which is fixed to the floor.[3]
Example
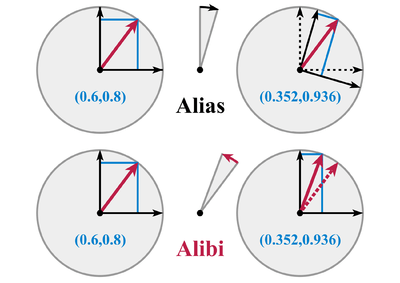
As an example, in the vector space ℝ2, let {e1,e2} be a basis, and consider the vector v = v1e1 + v2e2. A rotation of the vector through angle θ is given by the rotation matrix:

which can be viewed either as an active transformation or a passive transformation (where the above matrix will be inverted), as described below.
Active transformation
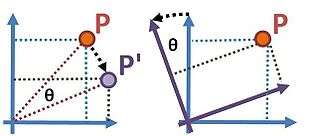
As an active transformation, R rotates the initial vector v, and a new vector v' is obtained. For a counterclockwise rotation of v with respect to the fixed coordinate system:

If one views {Re1,Re2} as a new basis, then the coordinates of the new vector v′ in the new basis are the same as those of v in the original basis. Note that active transformations make sense even as a linear transformation into a different vector space. It makes sense to write the new vector in the unprimed basis (as above) only when the transformation is from the space into itself.
Passive transformation
On the other hand, when one views R as a passive transformation, the initial vector v is left unchanged, while the coordinate system and its basis vectors are rotated. In order for the vector to remain fixed, the coordinates in terms of the new basis must change. For a counterclockwise rotation of coordinate systems:

From this equation one sees that the new coordinates (that is, coordinates with respect to the new basis) are given by

so that

Thus, in order for the vector to remain unchanged by the passive transformation, the coordinates of the vector must transform according to the inverse of the active transformation operator.[4]
See also
References
- ↑ Weisstein, Eric W. "Alibi Transformation." From MathWorld--A Wolfram Web Resource.
- ↑ Weisstein, Eric W. "Alias Transformation." From MathWorld--A Wolfram Web Resource.
- 1 2 Joseph K. Davidson, Kenneth Henderson Hunt (2004). "§4.4.1 The active interpretation and the active transformation". Robots and screw theory: applications of kinematics and statics to robotics. Oxford University Press. p. 74 ff. ISBN 0-19-856245-4.
- ↑ Amidror, Isaac (2007). "Appendix D: Remark D.12". The theory of the Moiré phenomenon: Aperiodic layers. Springer. p. 346. ISBN 1-4020-5457-2.
- Dirk Struik (1953) Lectures on Analytic and Projective Geometry, page 84, Addison-Wesley.