History of robots
| Robotics |
|---|
The history of robots has its origins on the ancient world. The modern concept began to be developed with the onset of the Industrial Revolution which allowed for the use of complex mechanics and the subsequent introduction of electricity. This made it possible to power machines with small compact motors. In the early 20th century, the notion of a humanoid machine was developed. Today, it is now possible to envisage human sized robots with the capacity for near human thoughts and movement.
The first uses of modern robots were in factories as industrial robots – simple fixed machines capable of manufacturing tasks which allowed production without the need for human assistance. Digitally controlled industrial robots and robots making use of artificial intelligence have been built since the 1960s.
Early legends
Concept of artificial servants and companions date at least as far back as the ancient legends of Cadmus, who sowed dragon teeth that turned into soldiers, and the myth of Pygmalion whose statue of Galatea came to life. Many ancient mythologies included artificial people, such as the talking mechanical handmaidens built by the Greek god Hephaestus (Vulcan to the Romans) out of gold,[1] the clay golems of Jewish legend and clay giants of Norse legend. Chinese legend relates that in the 10th century BC, Yan Shi made an automaton resembling a human in an account from the Lie Zi text.
In Greek mythology, Hephaestus created utilitarian three-legged tables that could move about under their own power and a bronze man, Talos, that defended Crete. Talos was eventually destroyed by Media who cast a lightning bolt at his single vein of lead. To take the golden fleece Jason was also required to tame two fire breathing bulls with bronze hooves; and like Cadmus he sowed the teeth of a dragon into soldiers.[2]
The Indian Lokapannatti (11th/12th century[3]) tells the story of King Ajatashatru of Magadha who gathered the Buddhas relics and hid them in an underground stupa.[4] The Buddhas relics were protected by mechanical robots (bhuta vahana yanta), from the kingdom of Roma visaya; until they were disarmed by King Ashoka.[3][5] In the Egyptian legend of Rocail, the younger brother of Seth created a palace and a sepulcher containing autonomous statues that lived out the lives of men so realistically they were mistaken for having souls.[2] ...
In Christian legend, several of the men associated with the introduction of Arabic learning (and, through it, the reintroduction of Aristotle and Hero's works) to medieval Europe devised brazen heads that could answer questions posed to them. Albertus Magnus was supposed to have constructed an entire android who could perform some domestic tasks but was destroyed by Albert's student Thomas Aquinas for disturbing his thought.[2] The most famous legend concerned a bronze head devised by Roger Bacon which was destroyed or scrapped after he missed its moment of operation.[2]
Automata were popular in the imaginary worlds of medieval literature. For instance, the Middle Dutch tale Roman van Walewein ("The Romance of Walewein", early 13th century) described mechanical birds and angels producing sound by means of systems of pipes.[6][7]
Early beginnings

Concepts akin to a robot can be found as long ago as the 4th century BC, when the Greek mathematician Archytas of Tarentum postulated a mechanical bird he called "The Pigeon" which was propelled by steam. Yet another early automaton was the clepsydra, made in 250 BC by Ctesibius of Alexandria, a physicist and inventor from Ptolemaic Egypt.[8] Hero of Alexandria (10–70 AD) made numerous innovations in the field of automata, including one that allegedly could speak.
Taking up the earlier reference in Homer's Iliad, Aristotle speculated in his Politics (ca. 322 BC, book 1, part 4) that automatons could someday bring about human equality by making possible the abolition of slavery:
– There is only one condition in which we can imagine managers not needing subordinates, and masters not needing slaves. This condition would be that each instrument could do its own work, at the word of command or by intelligent anticipation, like the statues of Daedalus or the tripods made by Hephaestus, of which Homer relates that "Of their own motion they entered the conclave of Gods on Olympus", as if a shuttle should weave of itself, and a plectrum should do its own harp playing.
In ancient China, an account on automata is found in the Lie Zi text, written in the 3rd century BC, in which King Mu of Zhou (1023–957 BC) is presented with a life-size, human-shaped mechanical figure by Yan Shi, an "artificer".[9]
The Cosmic Engine, a 10-metre (33 ft) clock tower built by Su Song in Kaifeng, China, in 1088, featured mechanical mannequins that chimed the hours, ringing gongs or bells among other devices.[10][11]
Al-Jazari (1136–1206), a Muslim inventor during the Artuqid dynasty, designed and constructed a number of automatic machines, including kitchen appliances and musical automata powered by water. One particularly complex automaton included four automatic musicians that floated on a lake.

Hero's works on automata were translated into Latin amid the 12th century Renaissance. The early 13th-century artist-engineer Villard de Honnecourt sketched plans for several automata. At the end of the thirteenth century, Robert II, Count of Artois, built a pleasure garden at his castle at Hesdin that incorporated a number of robots, humanoid and animal.[12] [13] [14]
One of the first recorded designs of a humanoid robot was made by Leonardo da Vinci (1452–1519) in around 1495. Da Vinci's notebooks, rediscovered in the 1950s, contain detailed drawings of a mechanical knight in armour which was able to sit up, wave its arms and move its head and jaw.[15] The design is likely to be based on his anatomical research recorded in the Vitruvian Man but it is not known whether he attempted to build the robot (see: Leonardo's robot). In 1533, Johannes Müller von Königsberg created an automaton eagle and fly made of iron; both could fly.[16] John Dee is also known for creating a wooden beetle, capable of flying.[16]
Around 1700, many automatons were built including ones capable of acting, drawing, flying, and playing music;[16] some of the most famous works of the period were created by Jacques de Vaucanson in 1737, including an automaton flute player, tambourine player, and his most famous work, "The Digesting Duck". Vaucanson's duck was powered by weights and was capable of imitating a real duck by flapping its wings (over 400 parts were in each of the wings alone), eat grain, digest it, and defecate by excreting matter stored in a hidden compartment.[17]
The Japanese craftsman Hisashige Tanaka, known as "Japan's Edison", created an array of extremely complex mechanical toys, some of which were capable of serving tea, firing arrows drawn from a quiver, or even painting a Japanese kanji character. The landmark text Karakuri Zui (Illustrated Machinery) was published in 1796.[18]
Remote-controlled systems
Remotely operated vehicles were demonstrated in the late 19th century in the form of several types of remotely controlled torpedoes. The early 1870s saw remotely controlled torpedoes by John Ericsson (pneumatic), John Louis Lay (electric wire guided), and Victor von Scheliha (electric wire guided).[19]
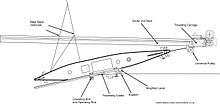
The Brennan torpedo, invented by Louis Brennan in 1877 was powered by two contra-rotating propellers that were spun by rapidly pulling out wires from drums wound inside the torpedo. Differential speed on the wires connected to the shore station allowed the torpedo to be guided to its target, making it "the world's first practical guided missile".[20] In 1898 Nikola Tesla publicly demonstrated a "wireless" radio-controlled torpedo that he hoped to sell to the U.S. Navy.[21][22]
Archibald Low was known as the "father of radio guidance systems" for his pioneering work on guided rockets and planes during the First World War. In 1917, he demonstrated a remote controlled aircraft to the Royal Flying Corps and in the same year built the first wire-guided rocket.
In the winter of 1970, the Soviet Union explored the surface of the moon with the lunar vehicle Lunokhod 1, the first roving remote-controlled robot to land on another celestial body.
Humanoid robots
The term "robot[23]" was first used to denote fictional automata in the 1921 play R.U.R. (Rossum's Universal Robots) by the Czech writer, Karel Čapek. According to Čapek, the word was created by his brother Josef from the Czech "robota", meaning servitude.[24] The play, R.U.R, replaced the popular use of the word "automaton" with the word "robot."[25] In 1927, Fritz Lang's Metropolis was released; the Maschinenmensch ("machine-human"), a gynoid humanoid robot, also called "Parody", "Futura", "Robotrix", or the "Maria impersonator" (played by German actress Brigitte Helm), was the first robot ever to be depicted on film.[26] In many films, radio and television programs of the 1950s and before, the word “robot” was usually pronounced “robit,” even though it was spelled “bot” and not “bit.” Examples include “The Lonely” episode of the TV series “The Twilight Zone,” first aired on November 15, 1959, and all episodes of the sci-fi radio program “X Minus One.”
Many robots were constructed before the dawn of computer-controlled servomechanisms, for the public relations purposes of major firms. These were essentially machines that could perform a few stunts, like the automatons of the 18th century. In 1928, one of the first humanoid robots was exhibited at the annual exhibition of the Model Engineers Society in London. Invented by W. H. Richards, the robot Eric's frame consisted of an aluminium body of armour with eleven electromagnets and one motor powered by a twelve-volt power source. The robot could move its hands and head and could be controlled through remote control or voice control.[27]
The first humanoid robot was a soldier with a trumpet, made in 1810 by Friedrich Kaufmann in Dresden, Germany. The robot was on display until at least April 30, 1950.
Westinghouse Electric Corporation built Televox in 1926 – it was a cardboard cutout connected to various devices which users could turn on and off. In 1939, the humanoid robot known as Elektro was debuted at the World's Fair.[28][29] Seven feet tall (2.1 m) and weighing 265 pounds (120.2 kg), it could walk by voice command, speak about 700 words (using a 78-rpm record player), smoke cigarettes, blow up balloons, and move its head and arms. The body consisted of a steel gear cam and motor skeleton covered by an aluminum skin. In 1928, Japan's first robot, Gakutensoku, was designed and constructed by biologist Makoto Nishimura.[30]
Modern autonomous robots
In 1941 and 1942, Isaac Asimov formulated the Three Laws of Robotics, and in the process of doing so, coined the word "robotics". In 1948, Norbert Wiener formulated the principles of cybernetics, the basis of practical robotics.
The first electronic autonomous robots with complex behaviour were created by William Grey Walter of the Burden Neurological Institute at Bristol, England in 1948 and 1949. He wanted to prove that rich connections between a small number of brain cells could give rise to very complex behaviors - essentially that the secret of how the brain worked lay in how it was wired up. His first robots, named Elmer and Elsie, were constructed between 1948 and 1949 and were often described as tortoises due to their shape and slow rate of movement. The three-wheeled tortoise robots were capable of phototaxis, by which they could find their way to a recharging station when they ran low on battery power.
Walter stressed the importance of using purely analogue electronics to simulate brain processes at a time when his contemporaries such as Alan Turing and John von Neumann were all turning towards a view of mental processes in terms of digital computation. His work inspired subsequent generations of robotics researchers such as Rodney Brooks, Hans Moravec and Mark Tilden. Modern incarnations of Walter's turtles may be found in the form of BEAM robotics.[31]
History of robots is linked to the development of artificial intelligence.

The first digitally operated and programmable robot was invented by George Devol in 1954 and was ultimately called the Unimate. This ultimately laid the foundations of the modern robotics industry.[32] Devol sold the first Unimate to General Motors in 1960, and it was installed in 1961 in a plant in Trenton, New Jersey to lift hot pieces of metal from a die casting machine and stack them.[33] Devol’s patent for the first digitally operated programmable robotic arm represents the foundation of the modern robotics industry.[34]
The Rancho Arm was developed as a robotic arm to help handicapped patients at the Rancho Los Amigos Hospital in Downey, California; this computer controlled arm was bought by Stanford University in 1963.[35] IBM announced its IBM System/360 in 1964. The system was heralded as being more powerful, faster, and more capable than its predecessors.[36]
Marvin Minsky created the Tentacle Arm in 1968; the arm was computer controlled and its 12 joints were powered by hydraulics.[35] Mechanical Engineering student Victor Scheinman created the Stanford Arm in 1969; the Stanford Arm is recognized as the first electronic computer controlled robotic arm (Unimate's instructions were stored on a magnetic drum).[35]
The first mobile robot capable of reasoning about its surroundings, Shakey was built in 1970 by the Stanford Research Institute (now SRI International). Shakey combined multiple sensor inputs, including TV cameras, laser rangefinders, and "bump sensors" to navigate.[35]
1970s
Freddy and Freddy II, both built in the United Kingdom, were robots capable of assembling wooden blocks in a period of several hours.[37] German based company KUKA built the world's first industrial robot with six electromechanically driven axes, known as FAMULUS.[38] In 1974, David Silver designed The Silver Arm; the Silver Arm was capable of fine movements replicating human hands. Feedback was provided by touch and pressure sensors and analyzed by a computer.[35]
The SCARA, Selective Compliance Assembly Robot Arm, was created in 1978 as an efficient, 4-axis robotic arm. Best used for picking up parts and placing them in another location, the SCARA was introduced to assembly lines in 1981.[39]
The Stanford Cart successfully crossed a room full of chairs in 1979. The Stanford Cart relied primarily on stereo vision to navigate and determine distances.[35] The Robotics Institute at Carnegie Mellon University was founded in 1979 by Raj Reddy.[40]
1980s

Takeo Kanade created the first "direct drive arm" in 1981. The first of its kind, the arm's motors were contained within the robot itself, eliminating long transmissions.[41]
In 1984 Wabot-2 was revealed; capable of playing the organ, Wabot-2 had 10 fingers and two feet. Wabot-2 was able to read a score of music and accompany a person.[42]
In 1986, Honda began its humanoid research and development program to create robots capable of interacting successfully with humans.[43] A hexapodal robot named Genghis was revealed by MIT in 1989. Genghis was famous for being made quickly and cheaply due to construction methods; Genghis used 4 microprocessors, 22 sensors, and 12 servo motors.[44] Rodney Brooks and Anita M. Flynn published "Fast, Cheap, and Out of Control: A Robot Invasion of The Solar System". The paper advocated creating smaller cheaper robots in greater numbers to increase production time and decrease the difficulty of launching robots into space.[45]
1990s
The biomimetic robot RoboTuna was built by doctoral student David Barrett at the Massachusetts Institute of Technology in 1996 to study how fish swim in water. RoboTuna is designed to swim and resemble a blue fin tuna.[46] Invented by Dr. John Adler, in 1994, the Cyberknife (a stereotactic radiosurgery performing robot) offered an alternative treatment of tumors with a comparable accuracy to surgery performed by human doctors.[47]

Honda's P2 humanoid robot was first shown in 1996. Standing for "Prototype Model 2", P2 was an integral part of Honda's humanoid development project; over 6 feet tall, P2 was smaller than its predecessors and appeared to be more human-like in its motions.[48]
Expected to only operate for seven days, the Sojourner rover finally shuts down after 83 days of operation in 1997. This small robot (only weighing 23 lbs) performed semi-autonomous operations on the surface of Mars as part of the Mars Pathfinder mission; equipped with an obstacle avoidance program, Sojourner was capable of planning and navigating routes to study the surface of the planet. Sojourner's ability to navigate with little data about its environment and nearby surroundings allowed the robot to react to unplanned events and objects.[49]
The P3 humanoid robot was revealed by Honda in 1998 as a part of the company's continuing humanoid project.[50] In 1999, Sony introduced the AIBO, a robotic dog capable of interacting with humans, the first models released in Japan sold out in 20 minutes.[51] Honda revealed the most advanced result of their humanoid project in 2000, named ASIMO. ASIMO is capable of running, walking, communication with humans, facial and environmental recognition, voice and posture recognition, and interacting with its environment.[52] Sony also revealed its Sony Dream Robots, small humanoid robots in development for entertainment.[53] In October 2000, the United Nations estimated that there were 742,500 industrial robots in the world, with more than half of the robots being used in Japan.[16]
2001-

In April 2001, the Canadarm2 was launched an orbit and attached to the International Space Station. The Canadarm2 is a larger, more capable version of the arm used by the Space Shuttle and is hailed as being "smarter."[54] Also in April, the Unmanned Aerial Vehicle Global Hawk made the first autonomous non-stop flight over the Pacific Ocean from Edwards Air Force Base in California to RAAF Base Edinburgh in Southern Australia. The flight was made in 22 hours.[55]
The popular Roomba, a robotic vacuum cleaner, was first released in 2002 by the company iRobot.[56]
In 2004, Cornell University revealed a robot capable of self-replication; a set of cubes capable of attaching and detaching, the first robot capable of building copies of itself.[57] On 3 and 24 January the Mars rovers Spirit and Opportunity land on the surface of Mars. Launched in 2003, the two robots will drive many times the distance originally expected, and Opportunity is still operating as of mid 2012.[58]
Self-driving cars had made their appearance by the middle of the first decade of the 21st century, but there was room for improvement. All 15 teams competing in the 2004 DARPA Grand Challenge failed to complete the course, with no robot successfully navigating more than five percent of the 150 mile off road course, leaving the $1 million prize unclaimed.[59] In 2005, Honda revealed a new version of its ASIMO robot, updated with new behaviors and capabilities.[60] In 2006, Cornell University revealed its "Starfish" robot, a 4-legged robot capable of self modeling and learning to walk after having been damaged.[61] In 2007, TOMY launched the entertainment robot, i-sobot, which is a humanoid bipedal robot that can walk like a human beings and performs kicks and punches and also some entertaining tricks and special actions under "Special Action Mode".
Robonaut 2, the latest generation of the astronaut helpers, launched to the space station aboard Space Shuttle Discovery on the STS-133 mission. It is the first humanoid robot in space, and although its primary job for now is teaching engineers how dexterous robots behave in space, the hope is that through upgrades and advancements, it could one day venture outside the station to help spacewalkers make repairs or additions to the station or perform scientific work.[62]
Commercial and industrial robots are now in widespread use performing jobs more cheaply or with greater accuracy and reliability than humans. They are also employed for jobs which are too dirty, dangerous or dull to be suitable for humans. Robots are widely used in manufacturing, assembly and packing, transport, earth and space exploration, surgery, weaponry, laboratory research, and mass production of consumer and industrial goods.[63]
With recent advances in computer hardware and data management software, artificial representations of humans are also becoming widely spread. Examples include OpenMRS[64] and EMRBots.[65]
See also
- History of artificial intelligence
- History of computing hardware
- History of mass production
- Numerical control
- Brazen Head
Notes
- ↑ Deborah Levine Gera (2003). Ancient Greek Ideas on Speech, Language, and Civilization. ISBN 978-0-19-925616-7. Retrieved 31 December 2007.
- 1 2 3 4 William Godwin (1876). "Lives of the Necromancers".
- 1 2 Strong 2007, p. 133-134.
- ↑ Strong 2007, p. 143.
- ↑ K.R. Norman (1983). Pali Literature. ISBN 9783447022859.
- ↑ Haug, "Walewein as a postclassical literary experiment", pp. 23–4; Roman van Walewein, ed. G.A. van Es, De Jeeste van Walewein en het Schaakbord van Penninc en Pieter Vostaert (Zwolle, 1957): 877 ff and 3526 ff.
- ↑ See also P. Sullivan, "Medieval Automata: The 'Chambre de beautés' in Benoît's Roman de Troie." Romance Studies 6 (1985): 1–20.
- ↑ Currie, Adam (1999). "The History of Robotics". Retrieved 10 September 2007.
- ↑ Needham, Joseph (1991). Science and Civilisation in China: Volume 2, History of Scientific Thought. Cambridge University Press. ISBN 0-521-05800-7.
- ↑ "Su Song's Clock: 1088". Retrieved 26 August 2007.
- ↑ "Earliest Clocks". A Walk Through Time. NIST Physics Laboratory. Retrieved 11 August 2008.
- ↑ http://ir.uiowa.edu/cgi/viewcontent.cgi?article=1850&context=mff
- ↑ Landsberg, Sylvia (1995). The Medieval Garden. New York: Thames and Hudson. p. 22.
- ↑ Macdougall, Elisabeth B. Medieval Gardens. Google Books. Retrieved 19 July 2012.
- ↑ A Brief History of Robotics, MegaGiant Robotics, 2005.
- 1 2 3 4 "Sir Richard Arkwright (1732–1792)". BBC. Retrieved 18 March 2008.
- ↑ "Vaucanson's duck". Retrieved 26 August 2007.
- ↑ T. N. Hornyak (2006). Loving the Machine: The Art and Science of Japanese Robots. Kodansha International.
- ↑ Edwyn Gray, Nineteenth-century torpedoes and their inventors, page 18
- ↑ Gray, Edwyn (2004). Nineteenth-Century Torpedoes and Their Inventors. Naval Institute Press. ISBN 1-59114-341-1.
- ↑ US 613809
- ↑ "Tesla – Master of Lightning". PBS.org. Retrieved 2008-09-24.
- ↑ Angelova, Kamelia (2011-07-06). "How Robots Have Evolved Over The Last 200 Years". Business Insider. Retrieved 13 October 2014.
- ↑ "R.U.R. (Rossum's Universal Robots)". Retrieved 26 August 2007.
- ↑ Asimov, Isaac; Frenkel, Karen (1985). Robots: Machines in Man’s Image. New York: Harmony Books. p. 13.
- ↑ "MegaGiantRobotics". Retrieved 26 August 2007.
- ↑ "AH Reffell & Eric Robot (1928)".
- ↑ "Robot Dreams : The Strange Tale Of A Man's Quest To Rebuild His Mechanical Childhood Friend". The Cleveland Free Times. Archived from the original on 21 November 2008. Retrieved 2008-09-25.
- ↑ Scott Schaut (2006). Robots of Westinghouse: 1924-Today. Mansfield Memorial Museum. ISBN 0-9785844-1-4.
- ↑ "Japan's first-ever robot". Yomiuri.co.jp. Retrieved 2014-02-08.
- ↑ Owen Holland. "The Grey Walter Online Archive". Retrieved 2008-09-25.
- ↑ Waurzyniak, Patrick (July 2006). "Masters of Manufacturing: Joseph F. Engelberger". Society of Manufacturing Engineers. 137 (1). Retrieved 2008-09-25.
- ↑ "Robot Hall of Fame – Unimate". Carnegie Mellon University. Retrieved 2008-08-28.
- ↑ "National Inventor's Hall of Fame 2011 Inductee". Invent Now. Retrieved 2011-03-18.
- 1 2 3 4 5 6 "Computer History Museum – Timeline of Computer History". Retrieved 30 August 2007.
- ↑ "IBM Archives: System/360 Announcement". Retrieved 29 August 2007.
- ↑ "Edinburgh Freddy Robot". Retrieved 31 August 2007.
- ↑ "first industrial robot with six electromechanically driven axes KUKA's FAMULUS". Retrieved 17 May 2008.
- ↑ "The Robot Hall of Fame : AIBO". Retrieved 31 August 2007.
- ↑ "Robotics Institute: About the Robotics Institute". Retrieved 1 September 2007.
- ↑ "Takeo Kanade Collection: Envisioning Robotics: Direct Drive Robotic Arms". Retrieved 31 August 2007.
- ↑ "2history". Archived from the original on 12 October 2007. Retrieved 31 August 2007.
- ↑ "P3". Honda Worldwide. Retrieved 1 September 2007.
- ↑ "Genghis, a six legged autonomous walking robot". Retrieved 1 September 2007.
- ↑ "Fast, Cheap, and Out of Control: A Robot Invasion of The Solar System" (PDF). Retrieved 1 September 2007.
- ↑ "Something's Fishy about this Robot". Retrieved 1 September 2007.
- ↑ "Stanford CyberKnife – Stanford University Medical Center". Retrieved 1 September 2007.
- ↑ "ASIMO". Honda Worldwide. Retrieved 20 July 2010.
- ↑ "The Robot Hall of Fame : Mars Pathfinder Sojourner Rover". Retrieved 1 September 2007.
- ↑ "The Honda Humanoid Robots". Retrieved 10 September 2007.
- ↑ "AIBOaddict! About". Retrieved 10 September 2007.
- ↑ "ASIMO". Honda Worldwide – Technology. Retrieved 10 September 2007.
- ↑ Williams, Martyn (21 November 2000). "Technology – Sony unveils prototype humanoid robot – November 22, 2000". CNN. Retrieved 12 September 2007.
- ↑ "NASA – Canadarm2 and the Mobile Servicing System". Retrieved 12 September 2007.
- ↑ "Global Hawk Flies Unmanned Across Pacific". Retrieved 12 September 2007.
- ↑ "Maid to Order". Time. 14 September 2002. Archived from the original on 13 August 2007. Retrieved 15 September 2007.
- ↑ "Cornell CCSL: Self replication". Retrieved 12 September 2007.
- ↑ "Mars Exploration Rover Mission: Overview". Retrieved 19 September 2012.
- ↑ "Robots fail to complete Grand Challenge – Mar 14, 2004". CNN. 6 May 2004. Retrieved 12 September 2007.
- ↑ "Honda Worldwide". 13 December 2005 "Honda Debuts New ASIMO". Retrieved 15 September 2007. Check date values in:
|date=(help) - ↑ "Cornell CCSL: Robotics Self Modeling". Retrieved 15 September 2007.
- ↑ "Robonaut | NASA". Nasa.gov. 2013-12-09. Retrieved 2014-02-08.
- ↑ "About us".
- ↑ "OpenMRS".
- ↑ "EMRBots".
References
- Haug, Walter. "The Roman van Walewein as a postclassical literary experiment." In Originality and Tradition in the Middle Dutch Roman van Walewein, ed. B. Besamusca and E. Kooper. Cambridge, 1999. 17–28.
Further reading
- Baumgartner, Emmanuèlle. "Le temps des automates." In Le Nombre du temps, en hommage à Paul Zumthor. Paris: Champion, 1988. pp. 15–21.
- Brett, G. "The Automata in the Byzantine 'Throne of Solomon'." Speculum 29 (1954): 477–87.
- Glaser, Horst Albert and Rossbach, Sabine: The Artificial Human, Frankfurt/M., Bern, New York 2011 "The Artificial Human. A Tragical History", ebook "The Artificial Humans. A Real History of Robots, Androids, Replicants, Cyborgs, Clones and all the rest"
- Sullivan, P. "Medieval Automata: The 'Chambre de beautés' in Benoît's Roman de Troie." Romance Studies 6 (1985). pp. 1–20.
- A robot time line with more than 500 projects listed
- History of Robots in 10 Minutes.
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||