Sojourner (rover)
 | |||||
| Mission type | Mars rover | ||||
|---|---|---|---|---|---|
| Operator | NASA | ||||
| Website | Official website | ||||
| Mission duration |
Planned: 7 sols (7 days) Mission end: 83 sols (85 days) From arrival on Mars | ||||
| Spacecraft properties | |||||
| Dry mass | 11.5 kilograms (25 lb) (Rover only) | ||||
| Start of mission | |||||
| Launch date | December 4, 1996, 06:58:07 UTC | ||||
| Rocket | Delta II 7925 D240 | ||||
| Launch site | Cape Canaveral LC-17B | ||||
| Contractor | McDonnell Douglas | ||||
| Deployed from | Mars Pathfinder | ||||
| Deployment date | July 5, 1997 | ||||
| End of mission | |||||
| Last contact | September 27, 1997 | ||||
| |||||


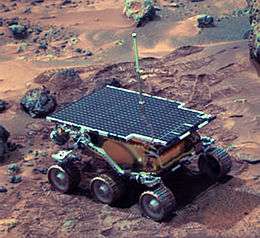
Sojourner was the Mars Pathfinder robotic Mars rover that landed on July 4, 1997[1] and explored Mars for around three months. It has front and rear cameras and hardware to conduct several scientific experiments. Designed for a mission lasting 7 sols, with possible extension to 30 sols,[2] it was in fact active for 83 sols. The base station had its last communication session with Earth at 3:23 a.m. Pacific Daylight Time on September 27, 1997.[1][3] The rover needed the base station to communicate with Earth, despite still functioning at the time communications ended.[3]
Sojourner traveled a distance of just over 100 metres (330 ft) by the time communication was lost.[4] It was instructed to stay stationary until October 5, 1997 (sol 91) and then drive around the lander.[5]
Overview
The word Sojourner first appeared in print in the first Bible printed by Gutenberg in 1454-1455. It specifically deals with the travels of Abraham, formerly Abram. It is easily found in the first chapter of Genesis. It means "traveler", and was selected in an essay contest won by V. Ambroise, a 12-year-old from U.S. state of Connecticut. It is named for abolitionist and women's rights activist Sojourner Truth. The second-place prize went to Deepti Rohatgi, 18, of Rockville, MD, who proposed Marie Curie, a Nobel Prize-winning Polish chemist. Third place went to Adam Sheedy, 16, of Round Rock, TX, who chose Judith Resnik, a United States' astronaut and shuttle crew-member.[6] The rover was also known as Microrover Flight Experiment abbreviated MFEX.[7]
Sojourner has solar panels and a non-rechargeable battery, which allowed limited nocturnal operations. Once the batteries were depleted, it could only operate during the day.[2] The batteries are lithium-thionyl chloride (LiSOCl2) and could provide 150 watt-hours.[8] The batteries also allowed the health of the rover to be checked while enclosed in the cruise stage while en route to Mars.[9]
0.22 square meters of solar cells could produce a maximum of about 15 watts on Mars, depending on conditions.[8] The cells were GaAs/Ge (Gallium Arsenide/Germanium) and capable of about 18 percent efficiency. They could survive down to about −140° Celsius (−220 °F).[9]
Its central processing unit (CPU) is an 80C85 with a 2 MHz clock, addressing 64 Kbytes of memory. It has four memory stores; the previously mentioned 64 Kbytes of RAM (made by IBM) for the main processor, 16 Kbytes of radiation-hardened PROM (made by Harris), 176 Kbytes of non-volatile storage (made by Seeq Technology), and 512 Kbytes of temporary data storage (made by Micron). The electronics were housed inside the Warm Electronics Box inside the rover.[2]
It communicated with the base station with 9,600 baud radio modems. The practical rate was closer to 2,600 baud with a theoretical range of about half a kilometer. The rover could travel out of range of the lander, but its software would need to be changed to that mode. Under normal driving, it would periodically send a "heartbeat" message to the lander.[2]
The UHF radio modems worked similar to walkie-talkies, but sent data, not voice. It could send or receive, but not both at same time, which is known as half-duplex. The data was communicated in bursts of 2 kilobytes.[10]
The Alpha Proton X-ray Spectrometer (APXS) is nearly identical to the one on Mars 96, and was a collaboration between the Max Planck Institute for Solar System Research in Lindau, Germany (formally known as the Max Planck Institute For Aeronomy) and the University of Chicago in the United States. APXS could determine elemental composition of Mars rocks and dust, except for hydrogen. It works by exposing a sample to alpha particles, then measuring the energies of emitted protons, X-rays, and backscattered alpha particles.[11]
The rover had three cameras: 2 monochrome cameras in front, and a color camera in the rear. Each front camera had an array 484 pixels high by 768 wide. The optics consisted of a window, lens, and field flattener. The window was made of sapphire, while the lens objective and flattener were made of zinc selenide.[12] The rover was imaged on Mars by the base station's IMP camera system, which also helped determine where the rover should go.[7]
Sojourner operation was supported by Rover Control Software, which ran on a Silicon Graphics Onyx2 computer back on Earth, and allowed command sequences to be generated using a graphical interface.[13] The rover driver would wear 3D goggles supplied with imagery from the base station and move a virtual model with the spaceball controller, a specialized joystick. The control software allowed the rover and surrounding terrain to be viewed from any angle or position, supporting the study of terrain features, placing waypoints, or doing virtual flyovers.[13]
The rover had a mass of 11.5 kg (weighing about 25 pounds on Earth), which equates to a weight of 4.5 kgf (10 pounds) on Mars.[4]
In popular culture
- In the 2000 film Red Planet, the crew of the first manned mission to Mars survives the crash-landing of their entry vehicle, but their communications equipment is destroyed so they cannot contact their recovery vehicle in orbit. To reestablish contact before being presumed dead and left behind by the pilot of their recovery vehicle, the crew goes to the site of the Pathfinder rover, from which they salvage parts to make a basic radio.[14]
- In the 2005 season 4 Star Trek: Enterprise episode "Terra Prime", Sojourner is briefly seen on the surface of Mars as a monument.
- In the 2014 novel The Martian by Andy Weir, and the 2015 film based on the book, the protagonist, stranded on Mars, recovers the Pathfinder lander and Sojourner rover, and is able to use it to contact Earth.[15]
Panorama
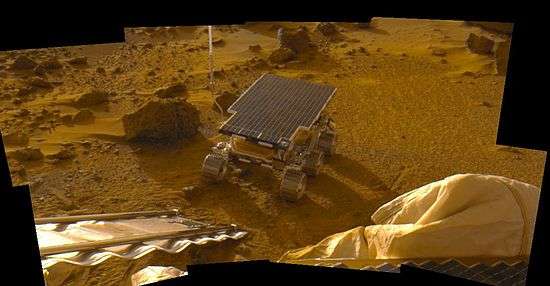
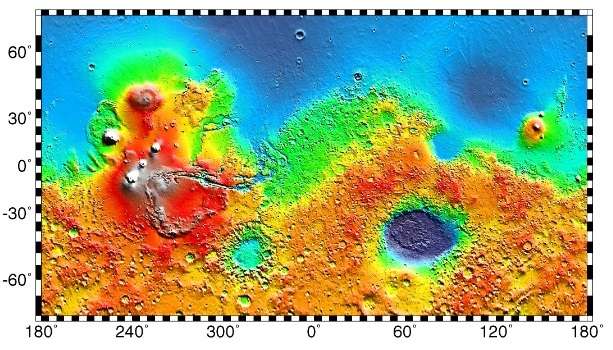
Sojourner's location in context
Comparison to later Mars-craft

See also
- Alpha particle X-ray spectrometer
- List of missions to Mars
- Materials Adherence Experiment (this was an experiment carried on Sojourner)
References
- 1 2 Nelson, Jon. "Mars Pathfinder / Sojourner Rover". NASA. Retrieved February 2, 2014.
- 1 2 3 4 "Mars Pathfinder FAQs - Sojourner".
- 1 2 "Mars Pathfinder - Mars - Sol 86 Images".
- 1 2 "Sojourner".
- ↑ "Mars Pathfinder - Mars - Sol 89 Images".
- ↑ "Pathfinder Rover Gets Its Name".
- 1 2 "Mars Pathfinder Microrover Ready to Roll!".
- 1 2 "Description of the Rover Sojourner".
- 1 2 "Mars Pathfinder Microrover".
- ↑ "How the Mars Microrover Radios and Antennas Work".
- ↑ "Mars Pathfinder Instrument Descriptions".
- ↑ "Rover Camera Instrument Description".
- 1 2 "MFEX Electronics".
- ↑ Pfarrer, Chuck; Lemkin, Jonathan (2000). "Red Planet" (PDF). The Daily Script. pg. 45. Retrieved December 10, 2015.
- ↑ Weir, Andy (2014). The Martian. New York: Crown Publishers. ISBN 978-0-8041-3902-1.
External links
| Wikimedia Commons has media related to Mars Pathfinder (rover). |
| Policy and history |
| |||||||
|---|---|---|---|---|---|---|---|---|
| Robotic programs |
| |||||||
| Human spaceflight programs |
| |||||||
| Individual featured missions (human and robotic) | ||||||||
| Communications and Navigation | ||||||||
| NASA lists | ||||||||
| ||||||||
| Current |   .jpg) .jpg) | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Past |
| ||||||||||||||||||
| Failed launch | |||||||||||||||||||
| Planned |
| ||||||||||||||||||
| Proposed | |||||||||||||||||||
| Cancelled / concepts | |||||||||||||||||||
| Related |
| ||||||||||||||||||
† indicates failure en route or before intended mission data returned. | |||||||||||||||||||