Minkowski space

In mathematical physics, Minkowski space or Minkowski spacetime is a combination of 3-dimensional Euclidean space and time into a 4-dimensional manifold where the spacetime interval between any two events is independent of the inertial frame of reference in which they are recorded. Although initially developed by mathematician Hermann Minkowski for Maxwell's equations of electromagnetism, the mathematical structure of Minkowski spacetime was shown to be an immediate consequence of the postulates of special relativity.[1]
Minkowski space is closely associated with Einstein's theory of special relativity, and is the most common mathematical structure on which special relativity is formulated. While the individual components in Euclidean space and time will often differ due to length contraction and time dilation, in Minkowski spacetime, all frames of reference will agree on the total distance in spacetime between events.[nb 1] Because it treats time differently than it treats the three spatial dimensions, Minkowski space differs from four-dimensional Euclidean space.
In 3-dimensional Euclidean space (e.g. simply space in Galilean relativity), the isometry group (the maps preserving the regular Euclidean distance) is the Euclidean group. It consists of rotations, reflections, and translations. When time is amended as a fourth dimension, the further transformations of translations in time and Galilean boosts are added, and the group of all these transformations is called the Galilean group. All Galilean transformations preserve the 3-dimensional Euclidean distance. This distance is purely spatial. Time differences are separately preserved as well. This changes in the spacetime of special relativity, where space and time are interwoven.
Spacetime is equipped with a non-positive definite non-degenerate bilinear form. This form is below variously called the Minkowski metric,[2] the Minkowski norm squared or Minkowski inner product depending on the context[nb 2] The Minkowski inner product is defined as to yield the spacetime interval between two events when given their coordinate difference vector as argument. Equipped with this inner product, the mathematical model of spacetime is called Minkowski space. The analogue of the Galilean group for Minkowski space, preserving the spacetime interval (as opposed to the spatial Euclidean distance) is the Poincaré group.
In summary, Galilean spacetime and Minkowski spacetime are, when viewed as barebones manifolds, actually the same. They differ in what kind of further structures are defined on them. In the former one has the Euclidean distance function and time (separately) together with inertial frames related by Galilean transformations, while in the latter one has the Minkowski metric together with inertial frames related by Poincare transformations.
History
| Part of a series on |
| Spacetime |
|---|
 |
|
Special Relativity General Relativity |
|
Classic Gravity |
Four-dimensional Euclidean spacetime
In 1905–06 Henri Poincaré showed[3] that by taking time to be an imaginary fourth spacetime coordinate ict, where c is the speed of light and i is the imaginary unit, a Lorentz transformation can formally be regarded as a rotation of coordinates in a four-dimensional space with three real coordinates representing space, and one imaginary coordinate representing time, as the fourth dimension. In physical spacetime special relativity stipulates that the quantity

is invariant under coordinate changes from one inertial frame to another, i. e. under Lorentz transformations. Here the speed of light c is, following Poincare, set to unity. In the space suggested by him (Poincare mentions this only in passing) where physical spacetime is coordinatized by (t, x, y, z) → (x, y, z, it), call it coordinate space, Lorentz transformations appear as ordinary rotations preserving the quadratic form

on coordinate space. The naming and ordering of coordinates, with the same labels for space coordinates, but with the imaginary time coordinate as the fourth coordinate, is conventional. The above expression, while making the former expression more familiar,[nb 3] may potentially be confusing because it is not the same t that appears in the latter (time coordinate) as in the former (time itself in some inertial system as measured by clocks stationary in that system).
Rotations in planes spanned by two space unit vectors appear in coordinate space as well as in physical spacetime appear as Euclidean rotations and are interpreted in the ordinary sense. The "rotation" in a plane spanned by a space unit vector and a time unit vector, while formally still a rotation in coordinate space, is a Lorentz boost in physical spacetime with real inertial coordinates (see also hyperbolic rotation). The analogy with Euclidean rotations is thus only only partial.
This idea was elaborated by Hermann Minkowski,[4] who used it to restate the Maxwell equations in four dimensions, showing directly their invariance under the Lorentz transformation. He further reformulated in four dimensions the then-recent theory of special relativity of Einstein. From this he concluded that time and space should be treated equally, and so arose his concept of events taking place in a unified four-dimensional spacetime continuum.
Minkowski space
In a further development in his 1908 "Space and Time" lecture,[5] he gave an alternative formulation of this idea that used a real time coordinate instead of an imaginary one, representing the four variables (x, y, z, t) of space and time in coordinate form in a four dimensional real vector space. Points in this space correspond to events in spacetime. In this space, there is a defined light-cone associated with each point, and events not on the light-cone are classified by their relation to the apex as spacelike or timelike. It is principally this view of spacetime that is current nowadays, although the older view involving imaginary time has also influenced special relativity. An imaginary time coordinate is used also for more subtle reasons in quantum field theory than formal appearance of expressions. It this context, the transformation is called a Wick rotation.[6]
In the English translation of Minkowski's paper, the Minkowski metric as defined below is referred to as the line element. The Minkowski inner product of below appears unnamed when referring to orthogonality (which he calls normality) of certain vectors, and the Minkowski norm squared is referred to (somewhat cryptically, perhaps this is translation dependent) as "sum".
Minkowski's principal tool is the Minkowski diagram, and he uses it to define concepts and demonstrate properties of Lorentz transformations (e.g. proper time and length contraction) and to provide geometrical interpretation to the generalization of Newtonian mechanics to relativistic mechanics. For these special topics, see the referenced articles, as the presentation below will be principally confined to the mathematical structure (Minkowski metric and from it derived quantities and the Poincare group as symmetry group of spacetime) following from the invariance of the spacetime interval on the spacetime manifold as consequences of the postulates of special relativity, not to specific application or derivation of the invariance of the spacetime interval. This structure provides the background setting of all present relativistic theories, barring general relativity for which flat Minkowski spacetime still provides a springboard as curved spacetime is locally Lorentzian.
Minkowski, aware of the fundamental restatement of the theory which he had made, said
The views of space and time which I wish to lay before you have sprung from the soil of experimental physics, and therein lies their strength. They are radical. Henceforth space by itself, and time by itself, are doomed to fade away into mere shadows, and only a kind of union of the two will preserve an independent reality.— Hermann Minkowski, 1908, 1909[5]
For further historical information see references Galison (1979), Corry (1997) and Walter (1999).
Mathematical structure
It is assumed below that spacetime is endowed with a coordinate system corresponding to an inertial frame. This provides an origin, which is necessary in order to be able to refer to spacetime as being modeled as a vector space. This is not really physically motivated in that a canonical origin ("central" event in spacetime) should exist. One can get away with less structure, but this needlessly complicates the discussion and would not reflect how flat spacetime is normally treated mathematically in modern introductory literature.
For an overview, Minkowski space is a 4-dimensional real vector space equipped with a nondegenerate, symmetric bilinear form on the tangent space at each point in spacetime, here simply called the Minkowski inner product, with metric signature either (+,−,−,−) or (−,+,+,+). The tangent space at each event is a vector space of the same dimension as spacetime, 4.
Tangent vectors
In practice, one need not be concerned with the tangent spaces. The vector space nature of Minkowski space allows for the canonical identification of vectors in tangent spaces at points (events) with vectors (points, events) in Minkowski space itself. See e.g. Lee (2003, Proposition 3.8.) These identifications are routinely done in mathematics. They can formally in Cartesian coordinates be expressed as[7]

with basis vectors in the tangent spaces defined by

Here p and q are any two events and the last identification is referred to as parallel transport. The first identification is the canonical identification of vectors in the tangent space at any point with vectors in the space itself. The appearance of basis vectors in tangent spaces as first order differential operators is due to this identification. It is motivated by the observation that a geometrical tangent vector can be associated in a one-to-one manner with a directional derivative operator on the set of smooth functions. This is promoted to a definition of tangent vectors in manifolds not necessarily being embedded in ℝn. This definition of tangent vectors is not the only possible one as ordinary n-tuples can be used as well.
A tangent vector at a point p may be defined, here specialized to Cartesian coordinates in Lorentz frames, as 4 × 1 column vectors v associated to each Lorentz frame related by Lorentz transformation Λ such that the vector v in a frame related to some frame by Λ transforms according to v → Λv. This is the same way in which the coordinates xμ transform. Explicitly,

This definition is equivalent to the definition given above under a canonical isomorphism.
For some purposes it is desirable to identify tangent vectors at a point p with displacement vectors at p, which is, of course, admissible by essentially the same canonical identification.[8] The identifications of vectors referred to above in the mathematical setting can correspondingly be found in a more physical and explicitly geometrical setting in Misner, Thorne & Wheeler (1970). They offer various degree of sophistication (and rigor) depending on which part of the material one chooses to read.
Metric signature
The metric signature refers to which sign the Minkowski inner product yields when given space (spacelike to be specific, defined further down) and time basis vectors (timelike) as arguments. Further discussion about this theoretically inconsequential, but practically necessary choice for purposes of internal consistency and convenience is deferred to the hide box below.
In general, but with several exceptions, mathematicians and general relativists prefer the former to yield a positive sign, while particle physicists tend to use the latter. Authors covering several areas of physics, e.g. Steven Weinberg and Landau and Lifshitz ((−,+,+,+) and (+,−,−,−) respectively) stick to one choice regardless of topic. Arguments for the former convention (pure space vectors yield positive "norm-squared") include "continuity" from the Euclidean case corresponding to the non-relativistic limit c → ∞. Arguments for the latter (pure space vectors yield negative "norm-squared") include that otherwise ubiquitous minus signs in particle physics go away. Yet other authors, especially of introductory texts, e.g. Kleppner & Kolenkow (1978), do not chose a signature at all, but instead opts to coordinatize spacetime such that the time coordinate (but not time itself!) is imaginary. This removes the need of the explicit introduction of a metric tensor (which may seem as an extra burden in an introductory course), and one needs not be concerned with covariant vectors and contravariant vectors (or raising and lowering indices) to be described below. The inner product is instead effected by a straightforward extension of the dot product in ℝ3 to ℝ3 × ℂ. This works in the flat spacetime of special relativity, but not in the curved spacetime of general relativity, see Misner, Thorne & Wheeler (1970, Box 2.1, Farewell to ict) (who, by the way use (−,+,+,+)). MTW also argues that it hides the true indefinite nature of the metric and the true nature of Lorentz boosts, which aren't rotations. It also needlessly complicates the use of tools of differential geometry that are otherwise immediately available and useful for geometrical description and calculation – even in the flat spacetime of special relativity, e.g. of the electromagnetic field.
Terminology
Mathematically associated to the bilinear form is a tensor of type (0,2) at each point in spacetime, called the Minkowski metric.[nb 4] The Minkowski metric, the bilinear form, and the Minkowski inner product are actually all the very same object; it is a bilinear function that accepts two (contravariant) vectors and returns a real number. In coordinates, this is the 4×4 matrix representing the bilinear form. Keeping this in mind may facilitate reading what follows.
For comparison, in general relativity, a Lorentzian manifold L is likewise equipped with a metric tensor g, which is a nondegenerate symmetric bilinear form on the tangent space TpL at each point p of L. In coordinates, it may be represented by a 4×4 matrix depending on spacetime position. Minkowski space is thus a comparatively simple special case of a Lorentzian manifold. Its metric tensor is in coordinates the same symmetric matrix at every point of M, and its arguments can, per above, be taken as vectors in spacetime itself.
Introducing more terminology (but not more structure), Minkowski space is thus a pseudo-Euclidean space with total dimension n = 4 and signature (3, 1) or (1, 3). Elements of Minkowski space are called events. Minkowski space is often denoted R3,1 or R1,3 to emphasize the chosen signature, or just M. It is perhaps the simplest example of a pseudo-Riemannian manifold.
An interesting example of non-inertial coordinates for (part of) Minkowski spacetime are the Born coordinates.
Pseudo-Euclidean metrics
The Minkowski metric[nb 5] η is the metric tensor of Minkowski space. It is a Pseudo-Euclidean metric, or more generally a constant Pseudo-Riemannian metric in Cartesian coordinates. As such it is a nondegenerate symmetric bilinear form, a type (0,2) tensor. It accepts two arguments up, vp, vectors in TpM, p ∈ M, the tangent space at p in M. Due to the above-mentioned canonical identification of TpM with M itself, it accepts arguments u, v with both u and v in M.
As a notational convention, vectors v in M, called 4-vectors, are denoted in sans-serif italics, and not, as is common in the Euclidean setting, with boldface v. The latter is generally reserved for the 3-vector part (to be introduced below) of a 4-vector.
The definition

yields an inner product-like structure on M, previously and also henceforth, called the Minkowski inner product, similar to the Euclidean inner product, but it describes a different geometry. It is also called the relativistic dot product. If the two arguments are the same,

the resulting quantity will be called the Minkowski norm squared. The Minkowski inner product satisfies the following properties.



The first two conditions imply bilinearity. The defining difference between a pseudo-inner product and an inner product proper is that the former is not required to be positive definite, that is, η(u, u) < 0 is allowed.
The most important feature of the inner product and norm squared is that these are quantities unaffected by Lorentz transformations. In fact, it can be taken as the defining property of a Lorentz transformation that it preserves the inner product (i.e. the value of the corresponding bilinear form on two vectors). This approach is taken more generally for all classical groups definable this way in classical group. There, the matrix Φ is identical in the case O(3, 1) (the Lorentz group) to the matrix η to be displayed below.
Two vectors v and w are said to be orthogonal if η(v, w) = 0.
A vector e is called a unit vector if η(e, e) = ±1. A basis for M consisting of mutually orthogonal unit vectors is called an orthonormal basis.
For a given inertial frame, an orthonormal basis in space, combined by the unit time vector, forms an orthonormal basis in Minkowski space. The number of positive and negative unit vectors in any such basis is a fixed pair of numbers, equal to the signature of the bilinear form associated with the inner product. This is Sylvester's law of inertia.
More terminology (but not more structure): The Minkowski metric is a pseudo-Riemannian metric, more specifically, a Lorentzian metric, even more specifically, the Lorentz metric, reserved for 4-dimensional flat spacetime with the remaining ambiguity only being the signature convention.
Minkowski metric
From the second postulate of special relativity, together with homogeneity of spacetime and isotropy of space, it follows that the spacetime interval between two arbitrary events called 1 and 2 is:
![{\displaystyle \pm \left[c^{2}(t_{1}-t_{2})^{2}-(x_{1}-x_{2})^{2}-(y_{1}-y_{2})^{2}-(z_{1}-z_{2})^{2}\right].}](../I/m/e863c63cebac4f7f578dd193c9a8186f6effb973.svg)
The interval is independent of the inertial frame chosen, as is shown here. The factor ±1 determines the choice of the metric signature as an arbitrary sign convention.[9] The numerical values of η, viewed as a matrix representing the Minkowski inner product, follow from the theory of bilinear forms.
Just as the signature of the metric is differently defined in the literature, this quantity is not consistently named. The interval (as defined here) is sometimes referred to as the interval squared.[10] Even the square root of the present interval occurs.[11] When signature and interval are fixed, ambiguity still remains as which coordinate is the time coordinate. It may be the fourth, or it may be the zeroth. This is not an exhaustive list of notational inconsistencies. It is a fact of life that one has to check out the definitions first thing when one consults the relativity literature.
The invariance of the interval under coordinate transformations between inertial frames follows from the invariance of
![\pm \left[c^{2}t^{2}-x^{2}-y^{2}-z^{2}\right]](../I/m/cadedc5b89577c462959d2e1a4cd0037face34cd.svg)
(with either sign ± preserved), provided the transformations are linear. This quadratic form can be used to define a bilinear form
![u\cdot v=\pm \left[c^{2}t_{1}t_{2}-x_{1}x_{2}-y_{1}y_{2}-z_{1}z_{2}\right].](../I/m/738e6150b199b0882940479d76bcd3fac4ee08dd.svg)
via the polarization identity. This bilinear form can in turn be written as
![u\cdot v=u^{\mathrm {T} }[\eta ]v,](../I/m/eaf03699ec54ac6d7af310ef7254e9dee38cc0a0.svg)
where [η] is a 4×4 matrix associated with η. Possibly confusingly, denote [η] with just η as is common practice. The matrix is read off from the explicit bilinear form as

and the bilinear form

with which this section started by assuming its existence, is now identified.
For definiteness and shorter presentation, the signature (−,+,+,+) is adopted below. This choice (or the other possible choice) has no (known) physical implications. The symmetry group preserving the bilinear form with one choice of signature is isomorphic (under the map given here) with the symmetry group preserving the other choice of signature. This means that both choices are in accord with the two postulates of relativity. Switching between the two conventions is straightforward. If the metric tensor η has been used in a derivation, go back to the earliest point where it was used, substitute η for –η, and retrace forward to the desired formula with the desired metric signature.
Standard basis
A standard basis for Minkowski space is a set of four mutually orthogonal vectors { e0, e1, e2, e3 } such that

These conditions can be written compactly in the form

Relative to a standard basis, the components of a vector v are written (v0, v1, v2, v3) where the Einstein notation is used to write v = vμeμ. The component v0 is called the timelike component of v while the other three components are called the spatial components. The spatial components of a 4-vector v may be identified with a 3-vector v = (v1, v2, v3).
In terms of components, the Minkowski inner product between two vectors v and w is given by

and

Here lowering of an index with the metric was used.
Raising and lowering of indices
Technically, a non-degenerate bilinear form provides a map between a vector space and its dual, in this context, the map is between the tangent spaces of M and the cotangent spaces of M. At a point in M, the tangent and cotangent spaces are dual vector spaces (so the dimension of the cotangent space at an event is also 4). Just as an authentic inner product on a vector space with one argument fixed, by Riesz representation theorem, may be expressed as the action of a linear functional on the vector space, the same holds for the Minkowski inner product of Minkowski space.[13]
Thus if vμ are the components of a vector in a tangent space, then ημνvμ = vν are the components of a vector in the cotangent space (a linear functional). Due to the identification of vectors in tangent spaces with vectors in M itself, this is mostly ignored, and vectors with lower indices are referred to as covariant vectors. In this latter interpretation, the covariant vectors are (almost always implicitly) identified with vectors (linear functionals) in the dual of Minkowski space. The ones with upper indices are contravariant vectors. In the same fashion, the inverse of the map from tangent to cotangent spaces, explicitly given by the inverse of η in matrix representation, can be used to define raising of an index. The components of this inverse are denoted ημν. It happens that ημν = ημν. These maps between a vector space and its dual can be denoted η♭ (eta-flat) and η♯ (eta-sharp) by the musical analogy.[14]
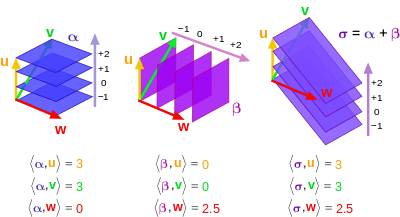
Contravariant and covariant vectors are geometrically very different objects. The first can and should be thought of as arrows. A linear functional can be characterized by two objects. It's kernel, which is a hyperplane passing through the origin, and its norm. Geometrically thus covariant vectors should viewed as a set of hyperplanes, with spacing depending on the norm (bigger = smaller spacing), with one of them (the kernel) passing through the origin. The mathematical term for a covariant vector is 1-covector or 1-form (though the latter is usually reserved for covector fields).
Misner, Thorne & Wheeler (1970) uses a vivid analogy with wave fronts of a de Broglie wave (scaled by a factor of Planck's reduced constant) quantum mechanically associated to a momentum four-vector to illustrate how one could imagine a covariant version of a contravariant vector. The inner product of two contravariant vectors could equally well be thought of as the action of the covariant version of one of them on the contravariant version of the other. The inner product is then how many time the arrow pierces the planes. The mathematical reference, Lee (2003), offers the same geometrical view of these objects (but mentions no piercing).
The electromagnetic field tensor is a differential 2-form, which geometrical description can as well be found in MTW.
One may, of course, ignore geometrical views all together (as is the style in e.g. Weinberg (2002) and Landau & Lifshitz 2002) and proceed algebraically in a purely formal fashion. The time-proven robustness of the formalism itself, sometimes referred to as index gymnastics, ensures that moving vectors around and changing from contravariant to covariant vectors and vice versa (as well as higher order tensors) is mathematically sound. Incorrect expressions tend to reveal themselves quickly.
The formalism of the Minkowski metric
The present purpose is to show semi-rigorously how formally one may apply the Minkowski metric to two vectors and obtain a real number, i.e. to display the rôle of the differentials, and how they disappear in a calculation. The setting is that of smooth manifold theory, and concepts such as convector fields and exterior derivatives are introduced.
A full-blown version of the Minkowski metric in coordinates as a tensor field on spacetime has the appearance

Explanation: The coordinate differentials are 1-form fields. They are defined as the exterior derivative of the coordinate functions xμ. These quantities evaluated at a point p provide a basis for the cotangent space at p. The tensor product (denoted by the symbol ⊗) yields a tensor field of type (0, 2), i.e. the type that expects two contravariant vectors as arguments. On the right hand side, the symmetric product between dxμ and dxν has been taken, and this is denoted by juxtaposition. The equality holds since, by definition, the Minkowski metric is symmetric.[15] (Thus the right hand side is not short-hand notation or abuse of notation.)
Tangent vectors are, in this formalism, given in terms of a basis of differential operators of the first order,

where p is an event. This operator applied to a function f gives the directional derivative of f at p in the direction of increasing xμ with xν, ν ≠ μ fixed. They provide a basis for the tangent space at p.
The exterior derivative df of a function f is a covector field, i.e. an assignment of a cotangent vector to each point p, by definition such that

for each vector field X. A vector field is an assignment of a tangent vector to each point p. In coordinates X can be expanded at each point p in the basis given by the ∂/∂xν|p. Applying this with f = xμ, the coordinate function itself, and X = ∂/∂xν, called a coordinate vector field, one obtains

Since this relation holds at each point p, the dxμ|p provide a basis for the cotangent space at each p and the bases dxμ|p and ∂/∂xν|p are dual to each other,

at each p. Furthermore, one has

for general one-forms on a tangent space α, β and general tangent vectors a, b. (This can be taken as a definition, but may also be proved in a more general setting.)
Thus when the metric tensor is fed two vectors fields a, b, both expanded in terms of the basis coordinate vector fields, the result is

where aμ, bν are the component functions of the vector fields. The above equation holds at each point p, and the relation may as well be interpreted as the Minkowski metric at p applied to two tangent vectors at p.
As mentioned, in a vector space, such as that modelling the spacetime of special relativity, tangent vectors can be canonically identified with vectors in the space itself, and vice versa. This means that the tangent spaces at each point are canonically identified with each other and with the vector space itself. This explains how the right hand side of the above equation can be employed directly, without regard to spacetime point the metric is to be evaluated and from where (which tangent space) the vectors come from.
This situation changes in general relativity. There one has

where now η → g(p), i.e. g is still a metric tensor but now depending on spacetime and is a solution of Einstein's field equations. Moreover a, b must be tangent vectors at spacetime point p and can no longer be moved around freely.
Lorentz transformations and symmetry

The Poincaré group is the group of all transformations preserving the interval. The interval is quite easily seen to be preserved by the translation group in 4 dimensions. The other transformations are those that preserve the interval and leave the origin fixed. Given the bilinear form associated with the Minkowski metric, the appropriate group follows directly from the theory (in particular the definition) of classical groups. In the linked article, one should identify η (in its a matrix representation) with the matrix Φ.
The appropriate group is O(3,1), in this context called the Lorentz group. Its elements are called (homogeneous) Lorentz transformations. For other methods of derivation, with a more physical twist, see derivations of the Lorentz transformations.
Among the simplest Lorentz transformations is a Lorentz boost. For reference, a boost in the x-direction is given by

where

is the Lorentz factor, and

Other Lorentz transformations are pure rotations, and hence elements of the SO(3) subgroup of O(3,1). A general homogeneous Lorentz transformation is a product of a pure boost and a pure rotation. An inhomogeneous Lorentz transformation is a homogeneous transformation followed by a translation in space and time. Special transformations are those that invert the space coordinates (P) and time coordinate (T) respectively, or both (PT).
All four-vectors in Minkowski space transform, by definition, according to the same formula under Lorentz transformations. Minkowski diagrams illustrate Lorentz transformations.
Causal structure
Vectors v = (ct, x, y, z) = (ct, r) are classified according to the sign of c2t2 - r2. A vector is timelike if c2t2 > r2, spacelike if c2t2 < r2, and null or lightlike if c2t2 = r2. This can be expressed in terms of the sign of η(v,v) as well, but depends on the signature. The classification of any vector will be the same in all frames of reference that are related by a Lorentz transformation (but not by a general Poincaré transformation because the origin may then be displaced) because of the invariance of the interval.
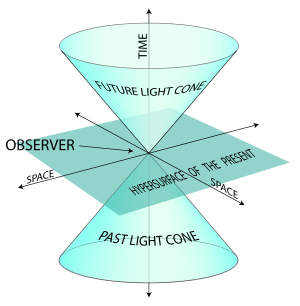
The set of all null vectors at an event[nb 6] of Minkowski space constitutes the light cone of that event. Given a timelike vector v, there is a worldline of constant velocity associated with it, represented by a straight line in a Minkowski diagram.
Once a direction of time is chosen,[nb 7] timelike and null vectors can be further decomposed into various classes. For timelike vectors one has
- future-directed timelike vectors whose first component is positive, (tip of vector located in absolute future in figure) and
- past-directed timelike vectors whose first component is negative (absolute past).
Null vectors fall into three classes:
- the zero vector, whose components in any basis are (0,0,0,0) (origin),
- future-directed null vectors whose first component is positive (upper light cone), and
- past-directed null vectors whose first component is negative (lower light cone).
Spacelike vectors are in elsewhere. The terminology stems from the fact that spacelike separated events are connected by vectors requiring faster-than-light travel, and so cannot possibly influence each other. Together with spacelike and lightlike vectors there are 7 classes in all.
An orthonormal basis for Minkowski space necessarily consists of one timelike and three spacelike unit vectors. If one wishes to work with non-orthonormal bases it is possible to have other combinations of vectors. For example, one can easily construct a (non-orthonormal) basis consisting entirely of null vectors, called a null basis. Over the reals, if two null vectors are orthogonal (zero Minkowski tensor value), then they must be proportional. However, allowing complex numbers, one can obtain a null tetrad, which is a basis consisting of null vectors, some of which are orthogonal to each other.
Vector fields are called timelike, spacelike or null if the associated vectors are timelike, spacelike or null at each point where the field is defined.
Chronological and causality relations
Let x, y ∈ M. We say that
- x chronologically precedes y if y − x is future-directed timelike. This relation has the transitive property and so can be written x < y.
- x causally precedes y if y − x is future-directed null or future-directed timelike. It gives a partial ordering of space-time and so can be written x ≤ y.
Reversed triangle inequality
If v and w are both future-directed timelike four-vectors, then in the (+ - - -) sign convention for norm,

Generalizations
A Lorentzian manifold is a generalization of Minkowski space in two ways. The total number of spacetime dimensions is not restricted to be 4 (2 or more) and a Lorentzian manifold need not be flat, i.e. it allows for curvature.
Generalized Minkowski space
Minkowski space refers to a mathematical formulation in four dimensions. However, the mathematics can easily be extended or simplified to create an analogous generalized Minkowski space in any number of dimensions. If n ≥ 2, n-dimensional Minkowski space is a vector space of real dimension n on which there is a constant Minkowski metric of signature (n − 1, 1) or (1, n − 1). These generalizations are used in theories where spacetime is assumed to have more or less than 4 dimensions. String theory and M-theory are two examples where n > 4. In string theory, there appears conformal field theories with 1 + 1 spacetime dimensions.
de Sitter space can be formulated as a submanifold of generalized Minkowski space as can the model spaces of hyperbolic geometry (see below).
Curvature
As a flat spacetime, the three spatial components of Minkowski spacetime always obey the Pythagorean Theorem. Minkowski space is a suitable basis for special relativity, a good description of physical systems over finite distances in systems without significant gravitation. However, in order to take gravity into account, physicists use the theory of general relativity, which is formulated in the mathematics of a non-Euclidean geometry. When this geometry is used as a model of physical space, it is known as curved space.
Even in curved space, Minkowski space is still a good description in an infinitesimal region surrounding any point (barring gravitational singularities).[nb 8] More abstractly, we say that in the presence of gravity spacetime is described by a curved 4-dimensional manifold for which the tangent space to any point is a 4-dimensional Minkowski space. Thus, the structure of Minkowski space is still essential in the description of general relativity.
Geometry
The meaning of the term geometry in the context of Minkowski space depends heavily on what is meant by geometry. Minkowski space is not endowed with a Euclidean geometry, not even with any of the generalized Riemannian geometries with intrinsic curvature, hyperbolic geometry and elliptic geometry. The reason is the indefiniteness of the Minkowski metric. It is, in particular, not a metric space.
It turns out that model spaces of hyperbolic geometry of low dimension, say 2 or 3, cannot be isometrically embedded in Euclidean space with one more dimension, i.e. ℝ3 or ℝ4 respectively, with the Euclidean metric g, disallowing easy visualization.[nb 9][16] By comparison, model spaces of elliptic geometry are just spheres in Euclidean space of one higher dimension. However, these spaces can be isometrically embedded in spaces of one more dimension when the embedding space is endowed with the Minkowski metric η.
Define H1(n)
R ⊂ Mn + 1 to be the upper sheet (ct > 0) of the hyperboloid

in generalized Minkowski space Mn + 1 of spacetime dimension n + 1. This is one of the surfaces of transitivity of the generalized Lorentz group. The metric induced on this submanifold,

the pullback of the Minkowski metric η under inclusion, is a Riemannian metric. With this metric H1(n)
R is a Riemannian manifold. It is one of the model spaces of Riemannian geometry, the hyperboloid model of hyperbolic space. It is a space of constant negative curvature −1/R2.[17] The 1 in the upper index refers to an enumeration of the different model spaces of hyperbolic geometry, and the n for its dimension. A 2(2) corresponds to the Poincaré disk model, while 3(n) corresponds to the Poincaré half-space model of dimension n.
Preliminaries
In the definition above ι:H1(n)
R → Mn + 1 is the inclusion map and the superscript star denotes the pullback. The present purpose is to describe this and similar operations as a preparation for the actual demonstration that H1(n)
R actually is a hyperbolic space.
Behavior of tensors under inclusion:
For inclusion maps from a submanifold S into M and a covariant tensor α of order k on M it holds that

where X1, X1, ..., Xk are vector fields on S. The subscript star denotes the pushforward (to be introduced later), and it is in this special case simply the identity map (as is the inclusion map). The latter equality holds because a tangent space to a submanifold at a point is in a canonical way a subspace of the tangent space of the manifold itself at the point in question. One may simply write

meaning (with slight abuse of notation) the restriction of α to accept as input vectors tangent to some s ∈ S only.
Pullback of tensors under general maps:
The pullback of a covariant k-tensor α (one taking only contravariant vectors as arguments) under a map F:M → N is a linear map

where for any vector space V,

It is defined by

where the subscript star denotes the pushforward of the map F, and X1, X2, ..., Xk are vectors in TpM. (This is in accord with what was detailed about the pullback of the inclusion map. In the general case here, one cannot proceed as simply because F∗X1 ≠ X1 in general.)
The pushforward of vectors under general maps:
Heuristically, pulling back a tensor to p ∈ M from F(p) ∈ N feeding it vectors residing at p ∈ M is by definition the same as pushing forward the vectors from p ∈ M to F(p) ∈ N feeding them to the tensor residing at F(p) ∈ N.
Further unwinding the definitions, the pushforward F∗:TMp → TNF(p) of a vector field under a map F:M → N between manifolds is defined by

where f is a function on N. When M = ℝm, N= ℝn the pushforward of F reduces to DF:ℝm → ℝn, the ordinary differential, which is given by the Jacobian matrix of partial derivatives of the component functions. The differential is the best linear approximation of a function F from ℝm to ℝn. The pushforward is the smooth manifold version of this. It acts between tangent spaces, and is in coordinates represented by the Jacobian matrix of the coordinate representation of the function.
The corresponding pullback is the dual map from the dual of the range tangent space to the dual of the domain tangent space, i.e. it is a linear map,

Hyperbolic stereographic projection

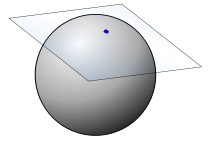
In order to exhibit the metric it is necessary to pull it back via a suitable parametrization. A parametrization of a submanifold S of M is a map U ⊂ ℝm → M whose range is an open subset of S. If S has the same dimension as M, a parametrization is just the inverse of a coordinate map φ:M → U ⊂ ℝm. The parametrization to be used is the inverse of hyperbolic stereographic projection. This is illustrated in the figure to the left for n = 2. It is instructive to compare to stereographic projection for spheres.
Stereographic projection σ:Hn
R → ℝn and its inverse σ−1:ℝn → Hn
R are given by

where, for simplicity, τ ≡ ct. The (τ, x) are coordinates on Mn + 1 and the u are coordinates on ℝ3.
Let

and let

If

then it is geometrically clear that the vector

intersects the hyperplane

once in point denoted

One has

or

By construction of stereographic projection one has

This leads to the system of equations

The first of these is solved for and one obtains for stereographic projection


Next, the inverse must be calculated. Use the same considerations as before, but now with


One gets

but now with depending on The condition for P lying in the hyperboloid is


or

leading to

With this , one obtains

Pulling back the metric
One has

and the map

The pulled back metric can be obtained by straightforward methods of calculus;

One computes according to the standard rules for computing differentials (though one is really computing the rigorously defined exterior derivatives),

and substitutes the results into the right hand side. This yields
![{\displaystyle (\sigma ^{-1})^{*}h_{R}^{1(n)}={\frac {4R^{2}\left[(du^{1})^{2}+\cdots +(du^{n})^{2}\right]}{(R^{2}-|u|^{2})^{2}}}\equiv h_{R}^{2(n)}.}](../I/m/0a6d8ed1a66745d3e786b53fdcfe39b94086930a.svg)
One has


and

With this one may write

from which

Summing this formula one obtains
![{\displaystyle {\begin{aligned}(dx^{1}(\mathbf {u} ))^{2}+\cdots +dx^{n}(\mathbf {u} ))^{2}&={\frac {4R^{2}(R^{2}-|u|^{2})^{2}\left[(du^{1})^{2}+\cdots +(du^{n})^{2}\right]+16R^{4}(R^{2}-|u|^{2})(\mathbf {u} \cdot d\mathbf {u} )(\mathbf {u} \cdot d\mathbf {u} )+16R^{4}|u|^{2}(\mathbf {u} \cdot d\mathbf {u} )^{2}}{(R^{2}-|u|^{2})^{4}}}\\&={\frac {4R^{2}(R^{2}-|u|^{2})^{2})\left[(du^{1})^{2}+\cdots +(du^{n})^{2}\right]}{(R^{2}-|u|^{2})^{4}}}+R^{2}{\frac {16R^{4}(\mathbf {u} \cdot d\mathbf {u} )}{(R^{2}-|u|^{2})^{4}}}.\end{aligned}}}](../I/m/be3475d59ef05ea5cc7397f7ea7f4da7bb0e40ca.svg)
Similarly, for τ one gets

yielding

Now add this contribution to finally get
This last equation shows that the metric on the ball is identical to the Riemannian metric h2(n)
R in the Poincaré ball model, another standard model of hyperbolic geometry.
The pullback can be computed in a different fashion. By definition,

In coordinates,

One has from the formula for σ–1

Lastly,

and the same conclusion is reached.
See also
Remarks
- ↑ This makes spacetime distance an invariant.
- ↑ Consistent use of the terms "Minkowski inner product", "Minkowski norm" or "Minkowski metric" is intended for the bilinear form here, since it is in widespread use. It is by no means "standard" in the literature, but no standard terminology seems to exist
- ↑ The surface x2 + y2 + z2 + t2 = R2 > 0 is a 3-sphere in ℝ4 and linear transformations preserving R2 are either rotations or reflections.
- ↑ For comparison and motivation of terminology, take a Riemannian metric, which provides a positive definite symmetric bilinear form, i. e. an inner product proper at each point on a manifold.
- ↑ The Minkowski inner product is not an inner product, since it is not positive-definite, i.e. the quadratic form η(v, v) need not be positive for nonzero v. The positive-definite condition has been replaced by the weaker condition of non-degeneracy. The bilinear form is said to be indefinite.
- ↑ Translate the coordinate system so that the event is the new origin.
- ↑ This corresponds to the time coordinate either increasing or decreasing when proper time for any particle increases. An application of T flips this direction.
- ↑ This similarity between flat and curved space at infinitesimally small distance scales is foundational to the definition of a manifold in general.
- ↑ There is an isometric embedding into ℝn according to the Nash embedding theorem (Nash (1956)), but the embedding dimension is much higher, n = (m/2)(m + 1)(3m + 11) for a Riemannian manifold of dimension m.
Notes
- ↑ Landau & Lifshitz 2002, p. 5
- ↑ Lee 1997, p. 31
- ↑ Poincaré 1905–1906, pp. 129–176 Wikisource translation: On the Dynamics of the Electron
- ↑ Minkowski 1907–1908, pp. 53–111 *Wikisource translation: The Fundamental Equations for Electromagnetic Processes in Moving Bodies.
- 1 2 Minkowski 1907–1909, pp. 75–88 Various English translations on Wikisource: Space and Time.
- ↑ E. g. the Wick rotation forces convergence of certain integrals along the time axis treated using residue theory in the complex time plane appearing in the theory of path integrals. Most confusingly, the resulting space is often called Euclidean spacetime.
- ↑ Lee 1997, p. 15
- ↑ Lee 2003, See Lee's discussion on geometric tangent vectors early in chapter 3.
- ↑ Rayner Ellis, G. F.; Williams, Ruth M. (2000). Flat and Curved Space-times (illustrated ed.). Oxford University Press. p. 209. ISBN 978-0-19-850656-0. Extract of page 209
- ↑ Sard 1970, p. 71
- ↑ Landau & Lifshitz 2002, p. 4
- ↑ Misner, Thorne & Wheeler 1973
- ↑ Lee 2003. One point in Lee's proof of existence of this map needs modification (Lee deals with Riemannian metrics.). Where Lee refers to positive definiteness to show injectivity of the map, one needs instead appeal to non-degeneracy.
- ↑ Lee 2003, The tangent-cotangent isomorphism p. 282.
- ↑ Lee 2003
- ↑ Lee 1997, p. 66
- ↑ Lee 1997
References
- Corry, L. (1997). "Hermann Minkowski and the postulate of relativity". Arch. Hist. Exact Sci. Springer-Verlag. 51 (4): 273–314. doi:10.1007/BF00518231. ISSN 0003-9519. (subscription required (help)).
- Catoni, F.; et al. (2008). Mathematics of Minkowski Space. Frontiers in Mathematics. Basel: Birkhäuser Verlag. doi:10.1007/978-3-7643-8614-6. ISBN 978-3-7643-8613-9. ISSN 1660-8046.
- Galison, P. L. (1979). R McCormach; et al., eds. Minkowski's Space-Time: from visual thinking to the absolute world. Historical Studies in the Physical Sciences. 10. Johns Hopkins University Press. pp. 85–121. doi:10.2307/27757388. JSTOR 27757388. (subscription required (help)).
- Kleppner, D.; Kolenkow, R. J. (1978) [1973]. An Introduction to Mechanics. London: McGraw-Hill. ISBN 0-07-035048-5.
- Landau, L.D.; Lifshitz, E.M. (2002) [1939]. The Classical Theory of Fields. Course of Theoretical Physics. 2 (4th ed.). Butterworth–Heinemann. ISBN 0 7506 2768 9.
- Lee, J. M. (2003). Introduction to Smooth manifolds. Springer Graduate Texts in Mathematics. 218. ISBN 0-387-95448-1.
- Lee, J. M. (1997). Riemannian Manifolds – An Introduction to Curvature. Springer Graduate Texts in Mathematics. 176. New York · Berlin · Heidelberg: Springer Verlag. ISBN 978-0-387-98322-6.
- Minkowski, Hermann (1907–1908), "Die Grundgleichungen für die elektromagnetischen Vorgänge in bewegten Körpern" [The Fundamental Equations for Electromagnetic Processes in Moving Bodies], Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, Mathematisch-Physikalische Klasse: 53–111 *Wikisource translation: The Fundamental Equations for Electromagnetic Processes in Moving Bodies
- Minkowski, Hermann (1908–1909), "Raum und Zeit" [Space and Time], Physikalische Zeitschrift, 10: 75–88 Various English translations on Wikisource: Space and Time
- Misner, Charles W.; Thorne, Kip. S.; Wheeler, John A. (1973), Gravitation, W. H. Freeman, ISBN 0-7167-0344-0
- Naber, G. L. (1992). The Geometry of Minkowski Spacetime. New York: Springer-Verlag. ISBN 0-387-97848-8.
- Nash, J. (1956). "The Imbedding Problem for Riemannian Manifolds". Annals of Mathematics. 63 (1): 20–63. doi:10.2307/1969989. JSTOR 1969989. MR 0075639.
- Penrose, Roger (2005). "18 Minkowskian geometry". Road to Reality : A Complete Guide to the Laws of the Universe. Alfred A. Knopf. ISBN 9780679454434.
- Poincaré, Henri (1905–1906), "Sur la dynamique de l'électron" [On the Dynamics of the Electron], Rendiconti del Circolo matematico di Palermo, 21: 129–176, doi:10.1007/BF03013466 Wikisource translation: On the Dynamics of the Electron
- Sard, R. D. (1970). Relativistic Mechanics - Special Relativity and Classical Particle Dynamics. New York: W. A. Benjamin. ISBN 978-0805384918.
- Shaw, R. (1982). "§ 6.6 Minkowski space, § 6.7,8 Canonical forms pp 221–242". Linear Algebra and Group Representations. Academic Press. ISBN 0-12-639201-3.
- Walter, Scott A. (1999). "Minkowski, Mathematicians, and the Mathematical Theory of Relativity". In Goenner, Hubert (ed.); et al. The Expanding Worlds of General Relativity. Boston: Birkhäuser. pp. 45–86. ISBN 0-8176-4060-6.
- Weinberg, S. (2002), The Quantum Theory of Fields, 1, Cambridge University Press, ISBN 0-521-55001-7
External links
![]() Media related to Minkowski diagrams at Wikimedia Commons
Media related to Minkowski diagrams at Wikimedia Commons
- Animation clip on YouTube visualizing Minkowski space in the context of special relativity.
- The Geometry of Special Relativity: The Minkowski Space - Time Light Cone
| Special relativity |
|  | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| General relativity |
| ||||||||||||||||||||||
| Scientists | |||||||||||||||||||||||