Pseudo-Euclidean space
In mathematics and theoretical physics, a pseudo-Euclidean space is a finite-dimensional real n-space together with a non-degenerate quadratic form q. Such a quadratic form can, given a suitable choice of basis (e1, ..., en), be applied to a vector x = x1e1 + ... + xnen, giving
- which is called the magnitude of the vector x.

For Euclidean spaces, k = n, implying that the quadratic form is positive-definite.[1] When 0 ≠ k ≠ n, q is an isotropic quadratic form. Note that if i ≤ k and j > k, then q(ei + ej) = 0, so that ei + ej is a null vector. In a pseudo-Euclidean space with k ≠ n, unlike in a Euclidean space, there exist vectors with negative magnitude.
As with the term Euclidean space, pseudo-Euclidean space may refer to either an affine space or a vector space, though the latter may also be referred to as a pseudo-Euclidean vector space[2] (see point–vector distinction).
Geometry
The geometry of a pseudo-Euclidean space is consistent in spite of a breakdown of the some properties of Euclidean space; most notably that it is not a metric space as explained below. The affine structure is unchanged, and thus also the concepts line, plane and, generally, of an affine subspace (flat), as well as line segments.
Positive, zero, and negative magnitudes
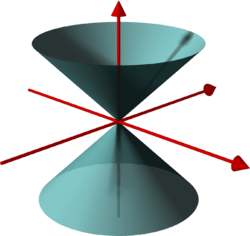
A null vector is a vector for which the quadratic form is zero. Unlike in a Euclidean space, the vector can be non-zero, in which case it is orthogonal to itself. If the quadratic form is indefinite, a pseudo-Euclidean space has a linear cone of null vectors given by { x : q(x) = 0 }. When the pseudo-Euclidean space provides a model for spacetime (see below), the null cone is called the light cone of the origin.
The null cone separates two open sets,[3] for which q(x) > 0 and q(x) < 0. If k ≥ 2, then the set of vectors for which q(x) > 0 is connected. If k = 1, then it consists of two disjoint parts, one with x1 > 0 and another with x1 < 0. Similar statements can be made for vectors for which q(x) < 0 if k is replaced with n − k.
Distance
The magnitude q corresponds to the square of a vector (or its norm) in Euclidean case. To define the vector norm (and distance) in an invariant manner, one has to get square roots of magnitudes, which leads to possibly imaginary distances; see square root of negative numbers. But even for a triangle with positive magnitudes of all three sides (whose square roots are real and positive), the triangle inequality is not necessarily true.
That's why terms norm and distance are avoided in pseudo-Euclidean geometry, replaced with magnitude and interval respectively.
Though, for a curve whose tangent vectors all have the same sign of magnitude, the arc length is defined. It has important applications: see proper time, for example.
Rotations and spheres
The rotations group of such space is indefinite orthogonal group O(q), also denoted as O(k, n − k) without a reference to particular quadratic form.[4] Such "rotations" preserve the form q and, hence, the magnitude of each vector including whether it is positive, zero, or negative.
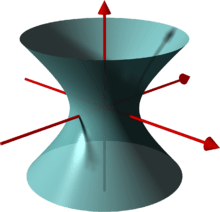
Whereas Euclidean space has a unit sphere, pseudo-Euclidean space has the hypersurfaces { x : q(x) = 1 } and { x : q(x) = −1 }. Such a hypersurface, called a quasi-sphere, is preserved by the appropriate indefinite orthogonal group.
Symmetric bilinear form
The quadratic form q gives rise to a symmetric bilinear form defined as follows:
![\langle x,y\rangle ={\frac {1}{2}}[q(x+y)-q(x)-q(y)]=\left(x_{1}y_{1}+\cdots +x_{k}y_{k}\right)-\left(x_{{k+1}}y_{{k+1}}+\cdots +x_{n}y_{n}\right).](../I/m/0698ef5d9e6aaf9d582d875a665474c0e2d46883.svg)
The quadratic form can be expressed in terms of the bilinear form: .

When , then x and y are orthogonal vectors of the pseudo-Euclidean space. This bilinear form is often referred to as the scalar product, and sometimes as "inner product" or "dot product", but it does not define an inner product space and its properties do not match to dot product of Euclidean vectors.

The standard basis of the real n-space is orthogonal. There are no orthonormal bases in a pseudo-Euclidean space for which the bilinear form is indefinite, because it cannot be used to define a vector norm.
Subspaces and orthogonality
For a (positive-dimensional) subspace[5] U of a pseudo-Euclidean space, when the magnitude form q is restricted to U, following three cases are possible:
- q|U is either positive or negative definite. Then, U is essentially Euclidean (up to the sign of q).
- q|U is indefinite, but non-degenerate. Then, U is itself pseudo-Euclidean. It is possible only if dim U ≥ 2; if dim U = 2, which means than U is a plane, then it is called a hyperbolic plane.
- q|U is degenerate.
One of most jarring properties (for a Euclidean intuition) of pseudo-Euclidean vectors and flats is their orthogonality. When two non-zero Euclidean vectors are perpendicular, they are not collinear. Any Euclidean linear subspace intersects with its orthogonal complement only by the {0} subspace. But the definition from the previous subsection immediately implies that any vector ν of zero magnitude is perpendicular to itself. Hence, for the 1-subspace N = ⟨ ν ⟩ generated by such non-zero vector, its orthogonal complement N⊥ will be a superspace of N.
The formal definition of the orthogonal complement of a vector subspace in a pseudo-Euclidean space gives a perfectly well-defined result, which satisfies the equality dim U + dim U⊥ = n due to the magnitude form's non-degeneracy. It is just the condition
- U ∩ U⊥ = {0} or, equivalently, U + U⊥ =all space,
which can be broken if the subspace U contains a null direction.[6] While subspaces form a lattice, as in any vector space, this ⊥ operation is not an orthocomplementation, in contrast to inner product spaces.
For a subspace N composed entirely of null vectors (which means that the magnitude q, restricted to N, equals to 0), always holds:
- N ⊂ N⊥ or, equivalently, N ∩ N⊥ = N.
Such a subspace can have up to min(k, n − k) dimensions.[7]
For a (positive) Euclidean k-subspace its orthogonal complement is a (n − k)-dimensional negative "Euclidean" subspace, and vice versa. Generally, for a (d+ + d− + d0)-dimensional subspace U consisting of d+ positive and d− negative dimensions (see Sylvester's law of inertia for clarification), its orthogonal "complement" U⊥ has (k − d+ − d0) positive and (n − k − d− − d0) negative dimensions, while the rest d0 ones are degenerate and form the U ∩ U⊥ intersection.
Parallelogram law and Pythagorean theorem
The parallelogram law takes the form

Using the square of the sum identity, for an arbitrary triangle one can express the magnitude of the third side from magnitudes of two sides and their bilinear form product:

This demonstrates that, for orthogonal vectors, a pseudo-Euclidean analog of the Pythagorean theorem holds:

Angle
Generally, absolute value | ⟨x, y⟩ | of the bilinear form on two vectors may be greater than √| q(x) q(y) |, equal to it, or less. This causes similar problems with definition of angle (see dot product#Geometric definition) as appeared above for distances. If k = 1 (only one positive term in q), then for positive-magnitude vectors:

which permits to define hyperbolic angle, an analog of angle between these vectors through inverse hyperbolic cosine:

It corresponds to the distance on a (n − 1)-dimensional hyperbolic space. This is known as rapidity in the context of theory of relativity discussed below. Unlike Euclidean angle, it takes values from [0, +∞) and equals to 0 for antiparallel vectors.
There is no reasonable definition of the angle between a null vector and another vector (either null or non-null).
Algebra and tensor calculus
Like Euclidean spaces, every pseudo-Euclidean space possesses a geometric algebra. Unlike properties above, where replacement of q to −q changed numbers but not geometry, the sign reversal of the magnitude form actually alters Cℓ, so for example Cℓ1,2(R) and Cℓ2,1(R) are not isomorphic.
Just like over any vector space, there are pseudo-Euclidean tensors. Like with a Euclidean structure, there are raising and lowering indices operators but, unlike the case with Euclidean tensors, there is no bases where these operations do not change values of components. If there is a vector vβ, the corresponding covariant vector is:

and with the standard-form

the first k components of vα are numerically the same as ones of vβ, but the rest n − k have opposite signs.
The correspondence between contravariant and covariant tensors makes a tensor calculus on pseudo-Riemannian manifolds analogous to one on Riemannian manifolds.
Examples
A very important pseudo-Euclidean space is Minkowski space, which is the mathematical setting in which Albert Einstein's theory of special relativity is formulated. For Minkowski space, n = 4 and k = 3[9] so that

The geometry associated with this pseudo-metric was investigated by Poincaré. Its rotation group is the Lorentz group. The Poincaré group includes also translations and plays the same role as Euclidean groups of ordinary Euclidean spaces.
Another pseudo-Euclidean space is the plane z = x + y j consisting of split-complex numbers, equipped with the quadratic form

This is the simplest case of an idefinite pseudo-Euclidean space (n = 2, k = 1) and the only one where the null cone dissects the space to four open sets. The group SO+(1, 1) consists of so named hyperbolic rotations.
See also
Footnotes
- ↑ Euclidean spaces are regarded as pseudo-Euclidean spaces – see for example Rafal Ablamowicz; P. Lounesto (2013), Clifford Algebras and Spinor Structures, Springer Science & Business Media, p. 32.
- ↑ Rafal Ablamowicz; P. Lounesto (2013), Clifford Algebras and Spinor Structures, Springer Science & Business Media, p. 32
- ↑ The standard topology on Rn is assumed.
- ↑ What is the "rotations group" depends on exact definition of a rotation. "O" groups contain improper rotations. Transforms that preserve orientation form the group SO(q), or SO(k, n − k), but it also is not connected if both k and n − k are positive. The group SO+(q), which preserves orientation on positive- and negative-magnitude parts separately, is a (connected) analog of Euclidean rotations group SO(n). Indeed, all these groups are Lie groups of dimension n(n − 1)/2.
- ↑ A linear subspace is assumed, but same conclusions are true for an affine flat with the only complication that the magnitude form is always defined on vectors, not points.
- ↑ Actually, U ∩ U⊥ is not zero only if the magnitude form q restricted to U is degenerate.
- ↑ Thomas E. Cecil (1992) Lie Sphere Geometry, page 24, Universitext Springer ISBN 0-387-97747-3
- ↑ Note that cos(i arcosh s) = s, so for s > 0 these can be understood as imaginary angles.
- ↑ Another well-established representation uses k = 1 and coordinate indices starting from 0 (thence q(x) = x02 − x12 − x22 − x32), but they are equivalent up to sign of q. See Sign convention § Metric signature.
References
- Werner Greub (1963) Linear Algebra, 2nd edition, §12.4 Pseudo-Euclidean Spaces, pp. 237–49, Springer-Verlag.
- Walter Noll (1964) "Euclidean geometry and Minkowskian chronometry", American Mathematical Monthly 71:129–44.
- Novikov, S. P.; Fomenko, A.T.; [translated from the Russian by M. Tsaplina] (1990). Basic elements of differential geometry and topology. Dordrecht; Boston: Kluwer Academic Publishers. ISBN 0-7923-1009-8.
- Poincaré, Science and Hypothesis 1906 referred to in the book B.A. Rosenfeld, A History of Non-Euclidean Geometry Springer 1988 (English translation) p. 266.
- Szekeres, Peter (2004). A course in modern mathematical physics: groups, Hilbert space, and differential geometry. Cambridge University Press. ISBN 0-521-82960-7.
- Shafarevich, I. R.; A. O. Remizov (2012). Linear Algebra and Geometry. Springer. ISBN 978-3-642-30993-9.
External links
- D.D. Sokolov (originator), Pseudo-Euclidean space, Encyclopedia of Mathematics