Mars Reconnaissance Orbiter
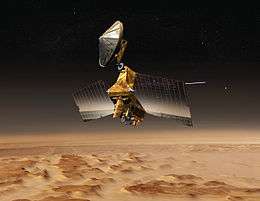 Conceptual image depicting the Mars Reconnaissance Orbiter in an elliptical low-planet orbit around Mars | |
| Mission type | Mars orbiter |
|---|---|
| Operator | NASA / JPL |
| COSPAR ID | 2005-029A |
| SATCAT № | 28788 |
| Website |
marsprogram www |
| Mission duration |
Primary mission: two years Elapsed:11 years, 3 months and 26 days from launch 10 years, 8 months and 28 days (3821 sols) at Mars |
| Spacecraft properties | |
| Manufacturer | Lockheed Martin / University of Arizona / APL / ASI / Malin Space Science Systems |
| Launch mass | 2,180 kg (4,810 lb) |
| Dry mass | 1,031 kg (2,273 lb) |
| Payload mass | 139 kg (306 lb) |
| Power | 2,000.0 watts |
| Start of mission | |
| Launch date | 12 August 2005, 11:43:00 UTC |
| Rocket | Atlas V 401 |
| Launch site | Cape Canaveral SLC-41 |
| Contractor | ILS |
| Orbital parameters | |
| Reference system | Areocentric |
| Regime | Sun-synchronous[1] |
| Inclination | 93 degrees[1] |
| Mars orbiter | |
| Orbital insertion |
10 March 2006, 21:24:00 UTC MSD 46990 12:48 AMT 20 Dhanus 211 Darian |
 | |
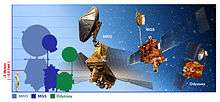
Mars Reconnaissance Orbiter (MRO) is a multipurpose spacecraft designed to conduct reconnaissance and exploration of Mars from orbit. The US$720 million spacecraft was built by Lockheed Martin under the supervision of the Jet Propulsion Laboratory (JPL). The mission is managed by the California Institute of Technology, at the JPL, in La Cañada Flintridge, California, for the NASA Science Mission Directorate, Washington, D.C. It was launched August 12, 2005, and attained Martian orbit on March 10, 2006. In November 2006, after five months of aerobraking, it entered its final science orbit and began its primary science phase. As MRO entered orbit, it joined five other active spacecraft that were either in orbit or on the planet's surface: Mars Global Surveyor, Mars Express, 2001 Mars Odyssey, and the two Mars Exploration Rovers (Spirit and Opportunity); at the time, this set a record for the most operational spacecraft in the immediate vicinity of Mars. Mars Global Surveyor and the Spirit rover have since ceased to function; the remainder remain operational as of September 2016.
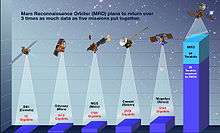
MRO contains a host of scientific instruments such as cameras, spectrometers, and radar, which are used to analyze the landforms, stratigraphy, minerals, and ice of Mars. It paves the way for future spacecraft by monitoring Mars' daily weather and surface conditions, studying potential landing sites, and hosting a new telecommunications system. MRO's telecommunications system will transfer more data back to Earth than all previous interplanetary missions combined, and MRO will serve as a highly capable relay satellite for future missions.[2]
Pre-launch
One of two missions considered for the 2003 Mars launch window, the MRO proposal lost against what became known as the Mars Exploration Rovers. The orbiter mission was rescheduled for launch in 2005,[3] and NASA announced its final name, Mars Reconnaissance Orbiter, on October 26, 2000.[4]
MRO is modeled after NASA's highly successful Mars Global Surveyor to conduct surveillance of Mars from orbit. Early specifications of the satellite included a large camera to take high resolution pictures of Mars. In this regard, James B. Garvin, the Mars exploration program scientist for NASA, proclaimed that MRO would be a "microscope in orbit".[5] The satellite was also to include a visible-near-infrared spectrograph.
On October 3, 2001, NASA chose Lockheed Martin as the primary contractor for the spacecraft's fabrication.[6] By the end of 2001 all of the mission's instruments were selected. There were no major setbacks during MRO's construction, and the spacecraft was moved to John F. Kennedy Space Center on May 1, 2005 to prepare it for launch.[7]
Mission objectives
MRO science operations were initially scheduled to last two Earth years, from November 2006 to November 2008. One of the mission's main goals is to map the Martian landscape with its high-resolution cameras in order to choose landing sites for future surface missions. The MRO played an important role in choosing the landing site of the Phoenix Lander, which explored the Martian Arctic in Green Valley.[8] The initial site chosen by scientists was imaged with the HiRISE camera and found to be littered with boulders. After analysis with HiRISE and the Mars Odyssey's THEMIS instrument a new site was chosen. Mars Science Laboratory, a highly maneuverable rover, also had its landing site inspected. The MRO provided critical navigation data during their landings and acts as a telecommunications relay.
MRO is using its onboard scientific equipment to study the Martian climate, weather, atmosphere, and geology, and to search for signs of liquid water in the polar caps and underground. In addition, MRO was tasked with looking for the remains of the previously lost Mars Polar Lander and Beagle 2 spacecraft.[9] Beagle 2 was found by the orbiter at the beginning of 2015.[10] After its main science operations are completed, the probe's extended mission is to be the communication and navigation system for landers and rover probes.[11]
Launch and orbital insertion

On August 12, 2005, MRO was launched aboard an Atlas V-401 rocket from Space Launch Complex 41 at Cape Canaveral Air Force Station.[12] The Centaur upper stage of the rocket completed its burns over a fifty-six-minute period and placed MRO into an interplanetary transfer orbit towards Mars.[13]
MRO cruised through interplanetary space for seven and a half months before reaching Mars. While en route most of the scientific instruments and experiments were tested and calibrated. To ensure proper orbital insertion upon reaching Mars, four trajectory correction maneuvers were planned and a fifth emergency maneuver was discussed.[14] However, only three trajectory correction maneuvers were necessary, which saved 60 pounds (27 kg) fuel that would be usable during MRO's extended mission.[15]
MRO began orbital insertion by approaching Mars on March 10, 2006, and passing above its southern hemisphere at an altitude of 370–400 kilometers (230–250 mi). All six of MRO's main engines burned for 27 minutes to slow the probe from 2,900 to 1,900 meters per second (9,500 to 6,200 ft/s). The helium pressurization tank was colder than expected, which reduced the pressure in the fuel tank by about 21 kilopascals (3.0 psi). The reduced pressure caused the engine thrust to be diminished by 2%, but MRO automatically compensated by extending the burn time by 33 seconds.[16]
Completion of the orbital insertion placed the orbiter in a highly elliptical polar orbit with a period of approximately 35.5 hours.[17] Shortly after insertion, the periapsis – the point in the orbit closest to Mars – was 426 km (265 mi) from the surface[17] (3,806 km (2,365 mi) from the planet's center). The apoapsis – the point in the orbit farthest from Mars – was 44,500 km (27,700 mi) from the surface (47,972 km (29,808 mi) from the planet's center).

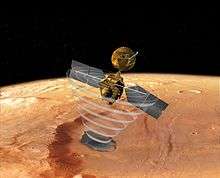
On March 30, 2006, MRO began the process of aerobraking, a three-step procedure that cuts in half the fuel needed to achieve a lower, more circular orbit with a shorter period. First, during its first five orbits of the planet (one Earth week), MRO used its thrusters to drop the periapsis of its orbit into aerobraking altitude. This altitude depends on the thickness of the atmosphere because Martian atmospheric density changes with its seasons. Second, while using its thrusters to make minor corrections to its periapsis altitude, MRO maintained aerobraking altitude for 445 planetary orbits (about five Earth months) to reduce the apoapsis of the orbit to 450 kilometres (280 mi). This was done in such a way so as to not heat the spacecraft too much, but also dip enough into the atmosphere to slow the spacecraft down. After the process was complete, MRO used its thrusters to move its periapsis out of the edge of the Martian atmosphere on August 30, 2006.[18][19]
In September 2006 MRO fired its thrusters twice more to fine-tune its final, nearly circular orbit to approximately 250 to 316 km (155 to 196 mi) above the Martian surface, with a period of about 112 minutes.[20][21] The SHARAD radar antennas were deployed on September 16. All of the scientific instruments were tested and most were turned off prior to the solar conjunction that occurred from October 7 to November 6, 2006. After the conjunction ended the "primary science phase" began.
On November 17, 2006 NASA announced the successful test of the MRO as an orbital communications relay. Using the NASA rover "Spirit" as the point of origin for the transmission, the MRO acted as a relay for transmitting data back to Earth.
Timeline

On September 29, 2006 (sol 402), MRO took its first high resolution image from its science orbit. This image is said to resolve items as small as 90 cm (3 feet) in diameter. On October 6, NASA released detailed pictures from the MRO of Victoria crater along with the Opportunity rover on the rim above it.[22] In November, problems began to surface in the operation of two MRO spacecraft instruments. A stepping mechanism in the Mars Climate Sounder (MCS) skipped on multiple occasions resulting in a field of view that is slightly out of position. By December normal operations of the instrument was suspended, although a mitigation strategy allows the instrument to continue making most of its intended observations.[23] Also, an increase in noise and resulting bad pixels has been observed in several CCDs of the High Resolution Imaging Science Experiment (HiRISE). Operation of this camera with a longer warm-up time has alleviated the issue. However, the cause is still unknown and may return.[24]
HiRISE continues to return images that have enabled discoveries regarding the geology of Mars. Foremost among these is the announcement of banded terrain observations indicating the presence and action of liquid carbon dioxide (CO2) or water on the surface of Mars in its recent geological past. HiRISE was able to photograph the Phoenix lander during its parachuted descent to Vastitas Borealis on May 25, 2008 (sol 990).
The orbiter continued to experience recurring problems in 2009, including four spontaneous resets, culminating in a four-month shut-down of the spacecraft from August to December.[25] While engineers have not determined the cause of the recurrent resets, they have created new software to help troubleshoot the problem should it recur.
On March 3, 2010, the Mars Reconnaissance Orbiter passed another significant milestone, having transmitted over 100 terabits of data back to Earth, which was more than all other interplanetary probes sent from Earth combined.[26]
On August 6, 2012 (sol 2483, the orbiter passed over Gale crater, the landing site of the Mars Science Laboratory mission, during its EDL phase. It captured an image via the HiRISE camera of the Curiosity rover descending with its backshell and supersonic parachute.
NASA reported that the Mars Reconnaissance Orbiter,[27] as well as the Mars Odyssey Orbiter[28] and MAVEN orbiter[29] had a chance to study the Comet Siding Spring flyby on October 19, 2014.[30][31]
On July 29, 2015, the Mars Reconnaissance Orbiter was placed into a new orbit to provide communications support during the arrival of the InSight Mars lander mission on September 28, 2016.[32] The maneuver's engine burn lasted for 75 seconds.[33]
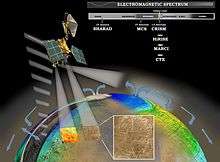
Instruments
Three cameras, two spectrometers and a radar are included on the orbiter along with two "science-facility instruments", which use data from engineering subsystems to collect science data. Three technology experiments will test and demonstrate new equipment for future missions.[34] It is expected MRO will obtain about 5,000 images per year.[35]
HiRISE (camera)

The High Resolution Imaging Science Experiment camera is a 0.5 m (1 ft 8 in) reflecting telescope, the largest ever carried on a deep space mission, and has a resolution of 1 microradian (μrad), or 0.3 m (1 ft 0 in) from an altitude of 300 km (190 mi). In comparison, satellite images of Earth are generally available with a resolution of 0.5 m (1 ft 8 in), and satellite images on Google Maps are available to 1 m (3 ft 3 in).[36] HiRISE collects images in three color bands, 400 to 600 nm (blue-green or B-G), 550 to 850 nm (red) and 800 to 1,000 nm (near infrared or NIR).[37]

Red color images are 20,264 pixels across (6 km (3.7 mi) wide), and B-G and NIR are 4,048 pixels across (1.2 km (0.75 mi) wide). HiRISE's onboard computer reads these lines in time with the orbiter's ground speed, and images are potentially unlimited in length. Practically however, their length is limited by the computer's 28 Gigabit (Gb) memory capacity, and the nominal maximum size is 20,000 × 40,000 pixels (800 megapixels) and 4,000 × 40,000 pixels (160 megapixels) for B-G and NIR images. Each 16.4 Gb image is compressed to 5 Gb before transmission and release to the general public on the HiRISE website in JPEG 2000 format.[21][38] To facilitate the mapping of potential landing sites, HiRISE can produce stereo pairs of images from which topography can be calculated to an accuracy of 0.25 m (9.8 in).[39] HiRISE was built by Ball Aerospace & Technologies Corp.
 Resolution and field of view compared for HiRISE and Mars Orbiter Camera on Mars Global Surveyor.
Resolution and field of view compared for HiRISE and Mars Orbiter Camera on Mars Global Surveyor.
CTX (camera)
The Context Camera (CTX) provides grayscale images (500 to 800 nm) with a pixel resolution up to about 6 m (20 ft). CTX is designed to provide context maps for the targeted observations of HiRISE and CRISM, and is also used to mosaic large areas of Mars, monitor a number of locations for changes over time, and to acquire stereo (3D) coverage of key regions and potential future landing sites.[40][41] The optics of CTX consist of a 350 mm (14 in) focal length Maksutov Cassegrain telescope with a 5,064 pixel wide line array CCD. The instrument takes pictures 30 km (19 mi) wide and has enough internal memory to store an image 160 km (99 mi) long before loading it into the main computer.[42] The camera was built, and is operated by Malin Space Science Systems. CTX mapped 50% of Mars by February 2010.[43] In 2012 it found the impacts of six 55-pound (25-kilogram) entry ballast masses from Mars Science Laboratory's landing of Curiosity rover.[44]
MARCI (camera)

The Mars Color Imager (MARCI) is a wide-angle, relatively low-resolution camera that views the surface of Mars in five visible and two ultraviolet bands. Each day, MARCI collects about 84 images and produces a global map with pixel resolutions of 1 to 10 km (0.62 to 6.21 mi). This map provides a daily weather report for Mars, helps to characterize its seasonal and annual variations, and maps the presence of water vapor and ozone in its atmosphere.[45] The camera was built and is operated by Malin Space Science Systems. It has a 180-degree fisheye lens with the seven color filters bonded directly a single CCD sensor.[46]
CRISM (spectrometer)

The Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) instrument is a visible and near infrared (VNIR) spectrometer that is used to produce detailed maps of the surface mineralogy of Mars. It operates from 370 to 3920 nm, measures the spectrum in 544 channels (each 6.55 nm wide), and has a resolution of 18 m (59 ft) at an altitude of 300 km (190 mi). CRISM is being used to identify minerals and chemicals indicative of the past or present existence of water on the surface of Mars. These materials include iron, oxides, phyllosilicates, and carbonates, which have characteristic patterns in their visible-infrared energy.[47]
Mars Climate Sounder
The Mars Climate Sounder (MCS) looks both down and horizontally through the atmosphere in order to quantify the global atmosphere’s vertical variations. It is a spectrometer with one visible/near infrared channel (0.3 to 3.0 μm) and eight far infrared (12 to 50 μm) channels selected for the purpose. MCS observes the atmosphere on the horizon of Mars (as viewed from MRO) by breaking it up into vertical slices and taking measurements within each slice in 5 km (3.1 mi) increments. These measurements are assembled into daily global weather maps to show the basic variables of Martian weather: temperature, pressure, humidity, and dust density.[48]
This instrument, supplied by NASA’s Jet Propulsion Laboratory, Pasadena, California, utilizes technological advances to achieve the measurement objectives of a heavier, larger instrument originally developed at JPL for the 1992 Mars Observer and 1998 Mars Climate Orbiter missions.
SHARAD (radar)
MRO's Shallow Subsurface Radar (SHARAD) experiment is designed to probe the internal structure of the Martian polar ice caps. It also gathers planet-wide information about underground layers of ice, rock and possibly liquid water that might be accessible from the surface. SHARAD uses HF radio waves between 15 and 25 MHz, a range that allows it to resolve layers as thin as 7 m (23 ft) to a maximum depth of 1 km (0.6 mi). It has a horizontal resolution of 0.3 to 3 km (0.2 to 1.9 mi).[49] SHARAD is designed to operate in conjunction with the Mars Express MARSIS, which has lower resolution but penetrates to a much greater depth. Both SHARAD and MARSIS were made by the Italian Space Agency.[50]
Engineering instruments
In addition to its imaging equipment, MRO carries a variety of engineering instruments. The Gravity Field Investigation Package measures variations in the Martian gravitational field through variations in the spacecraft's velocity. Velocity changes are detected by measuring doppler shifts in MRO's radio signals received on Earth. The package also includes sensitive onboard accelerometers used to deduce the in situ atmospheric density of Mars during aerobraking.[51]
The Electra communications package is a UHF software-defined radio (SDR) that provides a flexible platform for evolving relay capabilities.[52] It is designed to communicate with other spacecraft as they approach, land, and operate on Mars. In addition to protocol controlled inter-spacecraft data links of 1 kbit/s to 2 Mbit/s, Electra also provides Doppler data collection, open loop recording and a highly accurate timing service based on a 5e−13 USO. Doppler information for approaching vehicles can be used for final descent targeting or descent and landing trajectory recreation. Doppler information on landed vehicles will also enable scientists to accurately determine the surface location of Mars landers and rovers. The two MER spacecraft currently on Mars utilize an earlier generation UHF relay radio providing similar functions through the Mars Odyssey orbiter. The Electra radio has proven its functionality by relaying information to and from the MER spacecraft, Phoenix Mars lander and Curiosity rover.
The Optical Navigation Camera images the Martian moons, Phobos and Deimos, against background stars to precisely determine MRO's orbit. Although moon imaging is not mission critical, it was included as a technology test for future orbiting and landing of spacecraft.[53] The Optical Navigation Camera was tested successfully in February and March 2006.[54] There is a proposal to search for small moons, dust rings, and old orbiters with it.[55]
Engineering data
Structure
Workers at Lockheed Martin Space Systems in Denver assembled the spacecraft structure and attached the instruments. Instruments were constructed at the Jet Propulsion Laboratory, the University of Arizona Lunar and Planetary Laboratory in Tucson, Arizona, Johns Hopkins University Applied Physics Laboratory in Laurel, Maryland, the Italian Space Agency in Rome, and Malin Space Science Systems in San Diego.[56] The total cost of the spacecraft was $720 million USD.[57]
The structure is made of mostly carbon composites and aluminum-honeycombed plates. The titanium fuel tank takes up most of the volume and mass of the spacecraft and provides most of its structural integrity. The spacecraft's total mass is less than 2,180 kg (4,810 lb) with an unfueled dry mass less than 1,031 kg (2,273 lb).[58]
Power systems

MRO gets all of its electrical power from two solar panels, each of which can move independently around two axes (up-down, or left-right rotation). Each solar panel measures 5.35 m × 2.53 m (17.6 ft × 8.3 ft) and has 9.5 m2 (102 sq ft) covered with 3,744 individual photovoltaic cells. Its high-efficiency triple junction solar cells are able to convert more than 26% of the Sun's energy directly into electricity and are connected together to produce a total output of 32 volts. At Mars, each of the panels produces more than 1,000 watts of power;[59] in contrast, the panels would generate 3,000 watts in a comparable Earth orbit by being closer to the Sun.[60]
MRO has two rechargeable nickel-hydrogen batteries used to power the spacecraft when it is not facing the Sun. Each battery has an energy storage capacity of 50 ampere-hours (180 kC). The full range of the batteries cannot be used due to voltage constraints on the spacecraft, but allows the operators to extend the battery life—a valuable capability, given that battery drain is one of the most common causes of long-term satellite failure. Planners anticipate that only 40% of the batteries' capacities will be required during the lifetime of the spacecraft.[60]
Electronic systems
MRO's main computer is a 133 MHz, 10.4 million transistor, 32-bit, RAD750 processor. This processor is a radiation-hardened version of a PowerPC 750 or G3 processor with a specially built motherboard. The RAD750 is a successor to the RAD6000. This processor may seem underpowered in comparison to a modern PC processor, but it is extremely reliable, resilient, and can function in solar flare-ravaged deep space.[61] The operating system software is VxWorks and has extensive fault protection protocols and monitoring.[62]
Data is stored in a 160 Gb (20 GB) flash memory module consisting of over 700 memory chips, each with a 256 Mbit capacity. This memory capacity is not actually that large considering the amount of data to be acquired; for example, a single image from the HiRISE camera can be as large as 28 Gb.[62]
Telecommunications system

The Telecom Subsystem on MRO is the best digital communication system sent into deep space so far and for the first time using capacity approaching turbo-codes. The Electra communications package is a UHF software-defined radio (SDR) that provides a flexible platform for evolving relay capabilities.[52] It is designed to communicate with other spacecraft as they approach, land, and operate on Mars. The system consists of a very large (3 metres (9.8 ft)) antenna, which is used to transmit data through the Deep Space Network via X-band frequencies at 8 GHz, and it demonstrates the use of the Ka band at 32 GHz for higher data rates. Maximum transmission speed from Mars is projected to be as high as 6 Mbit/s, a rate ten times higher than previous Mars orbiters. The spacecraft carries two 100-watt X-band amplifiers (one of which is a backup), one 35-watt Ka-band amplifier, and two Small Deep Space Transponders (SDSTs).[2]
Two smaller low-gain antennas are also present for lower-rate communication during emergencies and special events, such as launch and Mars Orbit Insertion. These antennas do not have focusing dishes and can transmit and receive from any direction. They are an important backup system to ensure that MRO can always be reached, even if its main antenna is pointed away from the Earth.[2]
The Ka-band subsystem was used for demonstration purposes. Due to lack of spectrum at 8.41 GHz X-band, future high-rate deep space missions will use 32 GHz Ka-band. NASA Deep Space Network (DSN) implemented Ka-band receiving capabilities at all three of its complexes (Goldstone, Canberra and Madrid) over its 34-m beam-waveguide (BWG) antenna subnet. During the cruise phase, spacecraft Ka-band telemetry was tracked 36 times by these antennas proving functionality at all antennas. Ka-band tests were also planned during the science phase, but during aerobraking a switch failed, limiting the X-band high gain antenna to a single amplifier.[63] If this amplifier fails all high-speed X-band communications will be lost. The Ka downlink is the only remaining backup for this functionality, and since the Ka-band capability of one of the SDST transponders has already failed,[64] (and the other might have the same problem) JPL decided to halt all Ka-band demonstrations and hold the remaining capability in reserve.[65]
By November 2013, the MRO had passed 200 terabits in the amount of science data returned. The data returned by the mission alone is more than three times the total data returned via NASA's Deep Space Network for all the other missions managed by NASA's Jet Propulsion Laboratory over the past 10 years.[66]
Propulsion and attitude control
The spacecraft uses a 1,175 l (258 imp gal; 310 US gal) fuel tank filled with 1,187 kg (2,617 lb) of hydrazine monopropellant. Fuel pressure is regulated by adding pressurized helium gas from an external tank. Seventy percent of the propellant was used for orbital insertion,[67] and it has enough propellant to keep functioning into the 2030s.[68]
MRO has twenty rocket engine thrusters on board. Six large thrusters each produce 170 N (38 lbf) of thrust for a total of 1,020 N (230 lbf) meant mainly for orbital insertion. These thrusters were originally designed for the Mars Surveyor 2001 Lander. Six medium thrusters each produce 22 N (4.9 lbf) of thrust for trajectory correction maneuvers and attitude control during orbit insertion. Finally, eight small thrusters each produce 0.9 N (0.20 lbf) of thrust for attitude control during normal operations.[67]
Four reaction wheels are also used for precise attitude control during activities requiring a highly stable platform, such as high-resolution imaging, in which even small motions can cause blurring of the image. Each wheel is used for one axis of motion. The fourth (skewed) wheel is a backup in case one of the other three wheels fails. Each wheel weighs 10 kg (22 lb) and can be spun as fast as 100 Hz or 6,000 rpm.[67]
In order to determine the spacecraft's orbit and facilitate maneuvers, sixteen Sun sensors – eight primaries and eight backups – are placed around the spacecraft to calibrate solar direction relative to the orbiter's frame. Two star trackers, digital cameras used to map the position of catalogued stars, provide NASA with full, three-axis knowledge of the spacecraft orientation and attitude. A primary and backup Miniature Inertial Measurement Unit (MIMU), provided by Honeywell, measures changes to the spacecraft attitude as well as any non-gravitationally induced changes to its linear velocity. Each MIMU is a combination of three accelerometers and three ring-laser gyroscopes. These systems are all critically important to MRO, as it must be able to point its camera to a very high precision in order to take the high-quality pictures that the mission requires. It has also been specifically designed to minimize any vibrations on the spacecraft, so as to allow its instruments to take images without any distortions caused by vibrations.[69]
Discoveries and photographs
Water ice in ice cap measured
Results published in 2009 of radar measurements of the north polar ice cap determined that the volume of water ice in the cap is 821,000 cubic kilometres (197,000 cu mi), equal to 30% of the Earth's Greenland ice sheet.[70]
Ice exposed in new craters
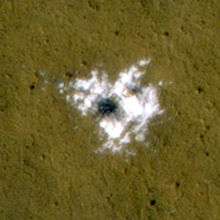
An article in the journal Science in September 2009,[71] reported that some new craters on Mars have excavated relatively pure water ice. After being exposed, the ice gradually fades as it sublimates away. These new craters were found and dated by the CTX camera, and the identification of the ice was confirmed with the Compact Imaging Spectrometer (CRISM) on board the Mars Reconnaissance Orbiter (MRO). The ice was found in a total of five locations. Three of the locations are in the Cebrenia quadrangle. These locations are 55°34′N 150°37′E / 55.57°N 150.62°E; 43°17′N 176°54′E / 43.28°N 176.9°E; and 45°00′N 164°30′E / 45°N 164.5°E. Two others are in the Diacria quadrangle: 46°42′N 176°48′E / 46.7°N 176.8°E and 46°20′N 176°54′E / 46.33°N 176.9°E.[72][73]
Ice in lobate debris aprons

Radar results from SHARAD suggested that features termed lobate debris aprons (LDAs) contain large amounts of water ice. Of interest from the days of the Viking Orbiters, these LDA are aprons of material surrounding cliffs. They have a convex topography and a gentle slope; this suggests flow away from the steep source cliff. In addition, lobate debris aprons can show surface lineations just as rock glaciers on the Earth.[74] SHARAD has provided strong evidence that the LDAs in Hellas Planitia are glaciers that are covered with a thin layer of debris (i.e. rocks and dust); a strong reflection from the top and base of LDAs was observed, suggesting that pure water ice makes up the bulk of the formation (between the two reflections).[75] Based on the experiments of the Phoenix lander and the studies of the Mars Odyssey from orbit, water ice is known to exist just under the surface of Mars in the far north and south (high latitudes).
Chloride deposits

Using data from Mars Global Surveyor, Mars Odyssey and the Mars Reconnaissance Orbiter, scientists have found widespread deposits of chloride minerals. Evidence suggests that the deposits were formed from the evaporation of mineral enriched waters. The research suggests that lakes may have been scattered over large areas of the Martian surface. Usually chlorides are the last minerals to come out of solution. Carbonates, sulfates, and silica should precipitate out ahead of them. Sulfates and silica have been found by the Mars Rovers on the surface. Places with chloride minerals may have once held various life forms. Furthermore, such areas could preserve traces of ancient life.[76]
Other aqueous minerals
In 2009, a group of scientists from the CRISM team reported on 9 to 10 different classes of minerals formed in the presence of water. Different types of clays (also called phyllosilicates) were found in many locations. The physilicates identified included aluminum smectite, iron/magnesium smectite, kaolinite, prehnite, and chlorite. Rocks containing carbonate were found around the Isidis basin. Carbonates belong to one class in which life could have developed. Areas around Valles Marineris were found to contain hydrated silica and hydrated sulfates. The researchers identified hydrated sulfates and ferric minerals in Terra Meridiani and in Valles Marineris. Other minerals found on Mars were jarosite, alunite, hematite, opal, and gypsum. Two to five of the mineral classes were formed with the right pH and sufficient water to permit life to grow.[77]
Avalanches
The Mars Reconnaissance Orbiter CTX and HiRISE cameras have photographed a number of avalanches off the scarps of the northern polar cap as they were occurring.[78]
 Martian avalanche and debris falls (HiRISE 2008)
Martian avalanche and debris falls (HiRISE 2008) A photo with scale demonstrates the size of the avalanche.
A photo with scale demonstrates the size of the avalanche.
Other spacecraft
 Image of Phoenix landing on Mars, as seen by HiRISE. Although in the image it appears to be descending into the crater, Phoenix actually landed 20 km (12 mi) away from it.
Image of Phoenix landing on Mars, as seen by HiRISE. Although in the image it appears to be descending into the crater, Phoenix actually landed 20 km (12 mi) away from it. The Phoenix lander and its heatshield as seen by HiRISE
The Phoenix lander and its heatshield as seen by HiRISE Tracks of the rover Opportunity, as seen by HiRISE. The white dots are places where the rover stopped to perform scientific observations or turned.
Tracks of the rover Opportunity, as seen by HiRISE. The white dots are places where the rover stopped to perform scientific observations or turned.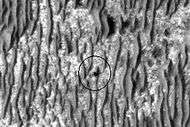 Opportunity as seen by HiRISE on January 29, 2009. Opportunity is on its way to Endeavour Crater, 17 km (11 mi) away at this point.
Opportunity as seen by HiRISE on January 29, 2009. Opportunity is on its way to Endeavour Crater, 17 km (11 mi) away at this point. The Curiosity rover during atmospheric entry as seen by HiRISE on August 6, 2012. Supersonic parachute and backshell visible.
The Curiosity rover during atmospheric entry as seen by HiRISE on August 6, 2012. Supersonic parachute and backshell visible.
Flowing salty water
On August 4, 2011 (sol 2125), NASA announced that MRO had detected what appeared to be flowing salty water on the surface or subsurface of Mars.[79] On September 28, 2015, this finding was confirmed at a special NASA news conference.[80][81]
See also
References
- 1 2 Lyons, Daniel T. (August 5–8, 2002). "MARS RECONNAISSANCE ORBITER: AEROBRAKING REFERENCE TRAJECTORY" (PDF). AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Retrieved March 9, 2012.
- 1 2 3 "Spacecraft Parts: Telecommunications". NASA's MRO website. Archived from the original on March 17, 2006. Retrieved May 28, 2006.
- ↑ "NASA GOES BACK TO THE FUTURE WITH PLANS FOR A MARS ROVER IN 2003". NASA. Retrieved July 7, 2006.
- ↑ "NASA Unveils Plans for 21st Century Mars Campaign". Space.com. Archived from the original on December 10, 2004. Retrieved July 4, 2006.
- ↑ "NASA outlines Mars Missions". Space.com. Archived from the original on February 28, 2006. Retrieved July 4, 2006.
- ↑ "NASA Picks Lockheed Martin to Build 2005 Mars Craft". Space.com. Archived from the original on February 12, 2006. Retrieved July 4, 2006.
- ↑ "Moving Day For Mars Reconnaissance Orbiter". Space.com. Retrieved July 4, 2006.
- ↑ Spaceflight Now | Delta Launch Report | Lander targets Mars' water
- ↑ "Mars Reconnaissance Orbiter Overview". Mars Reconnaissance Orbiter Website. Retrieved February 11, 2005.
- ↑ Knapton, Sarah (16 Jan 2015). "Beagle 2 found on surface of Mars after vanishing for 12 years". The Telegraph. Retrieved 3 March 2015.
- ↑ "Mission Timeline: Communications Relay". Mars Reconnaissance Orbiter Website. Archived from the original on March 6, 2006. Retrieved May 28, 2006.
- ↑ "ILS To Launch Mars Reconnaissance Orbiter For NASA On Atlas V". International Launch Services. Archived from the original on March 11, 2006. Retrieved June 30, 2006.
- ↑ "NASA's Multipurpose Mars Mission Successfully Launched". NASA Press Release from August 12, 2005. Retrieved May 30, 2006.
- ↑ "Mars Reconnaissance Orbiter: Multimedia". Archived from the original on April 10, 2006. Retrieved May 28, 2006.
- ↑ Leary, Warren E. (March 11, 2006). "U.S. Spacecraft Enters Orbit Around Mars". New York Times. Retrieved March 31, 2012.
- ↑ ""Spaceflight Now" MRO Mission Status Center". Retrieved March 12, 2006.
- 1 2 "New Mars Orbiter Ready for Action". Space.com. Retrieved May 28, 2006.
- ↑ "Mission Timeline: Aerobraking". Mars Reconnaissance Orbiter: The Mission. Archived from the original on March 6, 2006. Retrieved May 28, 2006.
- ↑ "Mars Orbiter Successfully Makes Big Burn". Retrieved August 30, 2006.
- ↑ "Mars Reconnaissance Orbiter Reaches Planned Flight Path". JPL. Retrieved September 13, 2006.
- 1 2 "Fact Sheet: HiRISE" (PDF). National Air and Space Museum. Retrieved February 18, 2006. (PDF)
- ↑ Mars orbiter looks down on rover
- ↑ Mars Climate Sounder Team Website – What We Do | The Planetary Society
- ↑ Deterioration of the sharpest eyes on Mars has stopped – mars-rovers – March 24, 2007 – New Scientist Space
- ↑ Morris, Jefferson (January 4, 2010). "Power Cycle". Aviation Week. McGraw-Hill: 17.
- ↑ "Scientists Wowed by Data From Mars Probe". Retrieved April 21, 2013.
- ↑ Webster, Guy; Brown, Dwayne (October 19, 2014). "NASA's Mars Reconnaissance Orbiter Studies Comet Flyby". NASA. Retrieved October 20, 2014.
- ↑ Webster, Guy; Brown, Dwayne (October 19, 2014). "NASA's Mars Odyssey Orbiter Watches Comet Fly Near". NASA. Retrieved October 20, 2014.
- ↑ Jones, Nancy; Steigerwald, Bill; Webster, Guy; Brown, Dwayne (October 19, 2014). "NASA's MAVEN Studies Passing Comet and Its Effects". NASA. Retrieved October 20, 2014.
- ↑ Webster, Guy; Brown, Dwayne; Jones, Nancy; Steigerwald, Bill (October 19, 2014). "All Three NASA Mars Orbiters Healthy After Comet Flyby". NASA. Retrieved October 20, 2014.
- ↑ France-Presse, Agence (October 19, 2014). "A Comet's Brush With Mars". New York Times. Retrieved October 20, 2014.
- ↑ Mars orbiter prepares for next year's InSight lander arrival. July 29, 2015.
- ↑ NASA Mars Orbiter Preparing for Mars Lander's 2016 Arrival
- ↑ "Spacecraft Parts: Instruments". Mars Reconnaissance Orbiter Website. Retrieved February 2005. Check date values in:
|access-date=(help) - ↑ "Stunning snaps from best camera ever sent to Mars". Newscientist. Retrieved December 2, 2006.
- ↑ "Google Earth FAQ" Google Earth Website.
- ↑ "MRO HiRISE Camera Specifications". HiRISE website. Retrieved January 2, 2006.
- ↑ "HiRISE: Instrument Development" (PDF). NASA Ames Research Center website. Retrieved February 7, 2006. (PDF)
- ↑ "HiRISE". HiRISE website. Retrieved May 28, 2006.
- ↑ Malin, M. C.; et al. (2007). "Context Camera Investigation on board the Mars Reconnaissance Orbiter". Journal of Geophysical Research. 112 (E05S04): 1–25. doi:10.1029/2006je002808.
- ↑ Harrison, Tanya N.; Malin, Michael C.; Edgett, Kenneth S. (2009). "Present-day activity, monitoring, and documentation of gullies with the Mars Reconnaissance Orbiter (MRO) Context Camera (CTX)". Geological Society of America Abstracts with Programs. 41 (7): 267. Bibcode:2009GSAA...41..267H.
- ↑ "MRO Context Imager (CTX) Instrument Description". Malin Space Science Systems website. Retrieved June 6, 2006.
- ↑ MSSS – Mars Reconnaissance Orbiter (MRO) Context Camera (CTX)
- ↑ NASA – First 360-Degree Panorama From NASA's Curiosity Mars Rover
- ↑ "Spacecraft Parts: Instruments: MARCI". MARCI website. Retrieved June 2, 2006.
- ↑ Mars Color Imager: How MARCI Takes Color Images, MRO MARCI Release No. MARCI2-3, 13 April 2006
- ↑ "CRISM Instrument Overview". CRISM Instrument Website. Archived from the original on March 7, 2005. Retrieved April 2, 2005.
- ↑ "Spacecraft Parts: Instruments: MCS". CRISM Instrument Website. Archived from the original on January 4, 2006. Retrieved May 28, 2006.
- ↑ NASA MRO web site (July 15, 2008). SHARAD: MRO Spacecraft parts
- ↑ KOMO-TV News Staff (August 12, 2005). NASA Launches Mars Orbiter. KOMO-TV.
- ↑ "Spacecraft Parts: Gravity Field Investigation Package". Mars Reconnaissance Orbiter Website. Archived from the original on March 31, 2006. Retrieved May 28, 2006.
- 1 2 Charles D. Edwards, Jr.; Thomas C. Jedrey; Eric Schwartzbaum; and Ann S. Devereaux; Ramon DePaula; Mark Dapore; Thomas W. Fischer. "The Electra Proximity Link Payload for Mars Relay Telecommunications and Navigation" (PDF).
- ↑ M. Adler, et al. – Use of MRO Optical Navigation Camera .. (2012)
- ↑ "Rad 750". BAE Aerospace Parts. Retrieved May 28, 2006.
- ↑ NASA Authorization Act of 2004, S.2541. thomas.loc.gov. Retrieved May 27, 2006)
- ↑ "Spacecraft Summary". NASA's MRO website. Archived from the original on March 2, 2006. Retrieved May 29, 2006.
- ↑ Tariq Malik, NASA's Next Mars Probe Takes Aim at Red Planet, Space.com, July 27, 2005 (Accessed May 2, 2012)
- 1 2 "Spacecraft Parts: Electrical Power". NASA's MRO website. Archived from the original on March 31, 2006. Retrieved May 28, 2006.
- ↑ "Rad 750" (PDF). BAE aerospace parts. Retrieved May 28, 2006.
- 1 2 "Spacecraft Parts: Command and Data-Handling Systems". NASA's MRO website. Archived from the original on March 31, 2006. Retrieved May 28, 2006.
- ↑ "MRO Waveguide Transfer Switch Anomaly".
- ↑ "CSAM Augments X-Ray Inspection of Die Attach (MRO Ka-Band Anomaly)".
- ↑ Bayer, T.J. (2008). In-Flight Anomalies and Lessons Learned from the Mars Reconnaissance Orbiter Mission. 2008 IEEE Aerospace Conference. IEEE. pp. 1–13. doi:10.1109/AERO.2008.4526483.
- ↑ "Prolific NASA Mars Orbiter Passes Big Data Milestone". Jet Propulsion Laboratory - NASA. 8 November 2013. Retrieved 2013-11-09.
- 1 2 3 "Spacecraft Parts: Propulsion". NASA's MRO website. Archived from the original on March 31, 2006. Retrieved May 28, 2006.
- ↑ Clark, Stephen (20 August 2015). "NASA to rely on Mars programme's silent workhorse for years to come". Astronomy Now. Retrieved 2015-08-20.
- ↑ Radar Map of Buried Mars Layers Matches Climate Cycles. Keith Cowing, September 22, 2009.
- ↑ Byrne, S. et al. 2009. Distribution of Mid-Latitude Ground Ice on Mars from New Impact Craters: 329.1674–1676
- ↑ Andrea Thompson (September 24, 2009). "Water Ice Exposed in Mars Craters". Space.com. Retrieved September 2, 2011.
- ↑ Susan Watanabe (September 23, 2009). "NASA to Hold Teleconference to Discuss New Findings About Mars". NASA. Retrieved September 2, 2011.
- ↑ Hugh H. Kieffer (1992). Mars. University of Arizona Press. ISBN 978-0-8165-1257-7. Retrieved March 7, 2011.
- ↑ http://www.planetary.brown.edu/pdfs/3733.pdf
- ↑ Osterloo, M. et al. 2008. Chloride-Bearing Materials in the Southern Highlands of Mars. Science. 319:1651–1654
- ↑ Murchie, S. et al. 2009. A synthesis of Martian aqueous mineralogy after 1 Mars year of observations from the Mars Reconnaissance Orbiter. Journal of Geophysical Research: 114.
- ↑ Russell, P. et al. (2008). Seasonally active frost-dust avalanches on a north polar scarp of Mars captured by HiRISE. Geophysical Research Letters 35, doi:10.1029/2008GL035790.
- ↑ Omar M. "Salty water may be flowing on Mars". ScienceBlog.com. Retrieved 2012-08-07.
- ↑ Chang, Kenneth (28 September 2015). "NASA Says Signs of Liquid Water Flowing on Mars". The New York Times. Retrieved 2015-09-28.
Christopher P. McKay, an astrobiologist at NASA’s Ames Research Center, does not think the R.S.L.s are a very promising place to look. For the water to be liquid, it must be so salty that nothing could live there, he said. “The short answer for habitability is it means nothing,” he said.
- ↑ Ojha, Lujendra; Wilhelm, Mary Beth; Murchie, Scott L.; McEwen, Alfred S.; et al. (28 September 2015). "Spectral evidence for hydrated salts in recurring slope lineae on Mars". Nature Geoscience. doi:10.1038/ngeo2546. Retrieved 2015-09-28.
Further reading
- Mishkin, Andrew (2004). Sojourner : An Insider's View of the Mars Pathfinder Mission. New York: Berkeley Books. ISBN 0-425-19199-0.
- Squyres, Steve (2005). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. New York: Hyperion. ISBN 1-4013-0149-5.
- Read, Peter L. & Lewis, Steven L. (2004). The Martian Climate Revisited: Atmosphere and Environment of a Desert Planet. Berlin: Springer. ISBN 3-540-40743-X.
- Zubrin, Robert (1997). The Case for Mars. London: Pocket Books. ISBN 0-684-83550-9.
External links
| Wikimedia Commons has media related to Mars Reconnaissance Orbiter. |
- A simulation of the arrival trajectory of the Mars Reconnaissance Orbiter
- CRISM Real Time Observations Viewer Java Application at The Johns Hopkins University Applied Physics Laboratory
- CTX Website
- HiBlog, the HiRISE Blog. Contains information about MRO.
- MARCI Website
- Mars Reconnaissance Orbiter Mission Profile by NASA's Solar System Exploration
- Mars Reconnaissance Orbiter Reception
- HiRise Image Catalog. The Lunar and Planetary Laboratory at The University of Arizona
- MARS TREK - Shows present over-head position of Mars Reconnaissance Orbiter
- Mars Reconnaissance Orbiter images at JPL
- Mars Reconnaissance Orbiter Website at JPL
- Mars Reconnaissance Orbiter Website at NASA
- Patterns of Mars – 12 High Resolution Photos by HiRISE on www.time.com
- SHARAD Website
| Policy and history |
| |||||||
|---|---|---|---|---|---|---|---|---|
| Robotic programs |
| |||||||
| Human spaceflight programs |
| |||||||
| Individual featured missions (human and robotic) | ||||||||
| Communications and Navigation | ||||||||
| NASA lists | ||||||||
| ||||||||
| Current |   .jpg) .jpg) | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Past |
| ||||||||||||||||||
| Failed at launch | |||||||||||||||||||
| Planned |
| ||||||||||||||||||
| Proposed | |||||||||||||||||||
| Cancelled / concepts | |||||||||||||||||||
| Related |
| ||||||||||||||||||
† indicates failure en route or before intended mission data returned. | |||||||||||||||||||