Surena (robot)
Surena (Persian: Surenā) is a series of Iranian humanoid robots, named after the Parthian General Surena.
Surena I
The SURENA I project was carried out at the Center for Advanced Vehicles (CAV), University of Tehran, with the financial support of the R&D Society of Iranian Industries and mines. During the public presentation ceremony, the SURENA’s certificate was signed by the minister of industry of Iran. The height and weight of SURENA I was 165 centimeters and 60 kilograms, respectively. The robot was able to speak according to a predefined text, and had remote control and predefined path tracking abilities. The robot was able to play football and speak Farsi. The robot was developed to show humanoid robot technical knowledge at University of Tehran.
SURENA II
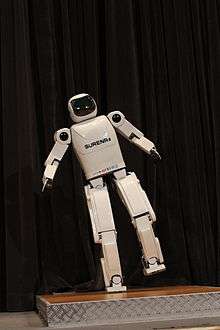
After SURENA I, the SURENA II humanoid robot project was launched, in 2008. Again, the project was carried out in CAV, and the financial support was provided by the R&D Society of Iranian Industries and mines. The design and fabrication procedure was finished on July 3, 2010. SURENA II was capable of walking as well as performing some exhibitive scenarios. The 145 cm SURENA II humanoid robot had 22 Degrees of Freedom (DOF). The robot was unveiled to the public during the industry and mine anniversary, before the president of Iran, Mahmood Ahmadinejad. After that public show, SURENA II appeared in the headlines of the news, while a lot of national and international news agencies covered the show, and reminisced SURENA II as the symbol of Robotics in Iran.
SURENA III

The design and fabrication procedure of the new generation of SURENA humanoid robot with the financial support of Industrial Development and Renovation Organization (IDRO) of Iran has been carried out in University of Tehran. SURENA III has 31 Degrees of Freedom (DOF) and its maneuverability, speed, and intelligence have been greatly improved. During this project, a team with 70 members composed of faculty members, robotic researchers and engineers from all over the country took part in the design, fabrication, and implementation procedure of the robot. The project has been conducted in three phases. The first phase focused on the design, modeling, sensor-actuator installation and mechanical fabrication, while the second phase more dealt with dynamics and control challenges, i.e. stability and walking speed enhancement. In the third phase, the high level control and artificial intelligence features have been added to the robot, and an original software framework has been developed.
Mechanical Design & Control
The humanoid robot SURENA III is composed of 12 DOF in its lower-body and 19 DOF in its upper-body. This robot has 6 DOF in each leg, 7 DOF in each arm, 1 DOF in each hand (a simple gripper), one DOF in torso and 2 DOF in neck. The sensory layout includes incremental and absolute encoders mounted on the motor output and gearbox output, six axes force/torque sensors embedded to the ankles, an IMU mounted on the upper-body, and contact switches embedded to each sole.
Design of the legs of a humanoid robot is certainly the most challenging part in the design procedure. The 6 DOF leg structure allows the foot to have dexterous motion with respect to the pelvis. The lower-body joints are actuated by EC motors and a combined timing belt-pulley and harmonic drive module is exploited for power transmission. Rigid and light-weight structure may greatly enhance performance of a position controlled walking machine. In order to alleviate the vibration of the joints which may be existed due to flexibility of harmonic drive or the cross modules (in ankle and hip), by employing high resolution absolute encoders at the joints output, the cascade position control loop has been exploited which decreased the vibration of the joints. In order to increase rigidity of the links, while keeping the robot’s weight low as much as possible, aluminum plates have been used for the shanks and thighs.
The upper body joints of SURENA III are driven by servomotor packages which include motor, gearbox and driver. One DOF in waist enlarges the workspace of the arms for gripping and whole body motions. Two DOFs in neck give the head capability of having pan and tilt motions. Furthermore, inspired from human beings, each arm of the robot has 7 DOF (three in shoulder, 1 in elbow, 3 in wrist), in which the actuators have been connected via fiberglass plates to reduce the weight. This redundant structure gives the robot arms capability of dexterous manipulation. Finally, a mechanism has been employed in hands to enable it to grip the objects. Using this mechanism, all 5 fingers of each hand may move simultaneously, and realize the gripping.
Artificial Intelligence & Electronics
SURENA III has a software and electronic structure that is responsible for high and low level control of the robot. This structure reads the sensory inputs, recognizes the objects and detects human face/motion, distinguishes the Persian commands, decides about robot’s actions and performs the requested tasks. SURENA III is an intelligent robot which can find its path by the surrounding signs. It can recognize human upper and lower limb configurations and imitate human actions. SURENA III has ability to detect human faces, count the number of people in its frontal view and localize them.
SURENA can understand and speak unlimited Persian language words or sentences. SURENA III voice detection is speaker independent and any new word can be taught easily to the robot by typing the word in its software kit. SURENA III has a graphical user interface that facilitates robot’s programming and error tracking. Moreover, each scenario and maneuver can be tested through the robot’s SDK which enables users to work with all programmed libraries, conveniently. Several electrical circuits have been designed for the SURENA III. Driving and synchronizing the actuators, reading sensors and supplying continues and safe power for robot are the tasks of electrical boards that have been designed and fabricated in CAST.[1]
| specifications | SURENA III |
|---|---|
| walking on flat terrains | Speed: 0.7 km/h, 10 step |
| walking on sloped terrains and stair sets | walking up and down on stairs (5 cm heights) and slopes (10 degrees) |
| Turning | Turning on spot and with all requested radiuses |
| Moving backward | Speed: 0.4 km/h |
| Moving on uneven surfaces | Stable on uneven surfaces with different height |
| vision | Face detection, object detection and recognition, body skeleton detection and imitation |
| audition | speech recognition (predefined word and sentences) |
| speaking | utilize unlimited words and sentences in smart scenarios |
| user software | SDK ( Standard Developing Kit ) designed to create and edit different scenarios, GUI (Graphical User Interface) special for system controlling, Observing sensors' output, testing actuators and algorithms |
| Object Manipulation | Able to manipulate objects up to 6.5 mm in diameter and weight up to 200g |
| Exhibitive Maneuvers | Shooting a ball with different diameters and performing some exhibitive actions |
See also
References
- ↑ "Surena Humanoid Robot | Surena". www.surenahumanoid.com. Retrieved 2016-02-18.
External links
- SURENA Humanoid Robot ENG Website
- SURENA Humanoid Robot Persian Website
- CAST Official Website (eng)
- CAST Official Website (persian)
- Iran Demonstrates New Humanoid Robot Surena III