US Orbital Segment

The US Orbital Segment (USOS) is the name given to the components of the International Space Station (ISS) constructed and operated by the United States National Aeronautics and Space Administration (NASA), European Space Agency (ESA), Canadian Space Agency (CSA) and Japan Aerospace Exploration Agency (JAXA). The segment currently consists of eleven pressurized components and various external elements, all of which were delivered by the Space Shuttle.
The segment is monitored and controlled from various mission control centers on the world including Lyndon B. Johnson Space Center in Houston, Texas, Columbus Control Center in Oberpfaffenhofen, Germany, Tsukuba Space Center in Tsukuba, Japan, and Marshall Space Flight Center in Huntsville, Alabama.
Modules
The US Orbital Segment consists of 11 pressurized modules. Of these, eight are habitable, one is for observation and three are for docking and mating.
Nodes
All three nodes have 4 ports around its exterior, and 1 port on each end. Each of the ports are called Common Berthing Mechanisms, or CBM's.
Unity
The first component of the USOS pressurized segment is the Unity node. On the aft end of Unity is the Pressurized Mating Adapter (PMA) 1. The PMA-1 connects Unity with the Russian segment. Unity is also connected to the Quest airlock on the starboard side, Tranquility on the port side, Leonardo on the nadir, and the Z1 truss on the zenith. The Destiny lab connects to the forward end, leading to the rest of the USOS. Unity is also used by the crews on board the ISS to eat meals and share some downtime together. The Unity node was delivered to the station by STS-88 on December 6, 1998.[1]
Harmony
The Harmony node is the central connecting node of the USOS. Harmony connects to the Destiny lab aft end, Kibo lab to the port side, and Columbus lab to the starboard side. The Harmony node's nadir and zenith ports also serves as the berthing port for H-II Transfer Vehicle (HTV), Dragon and Cygnus resupply vehicles. On the forward end of Harmony is PMA-2, which was used by visiting Space Shuttles as a mating adapter and by future manned missions to the ISS. Harmony was delivered by the STS-120 mission on October 23, 2007.[2]
Tranquility and Cupola
The Tranquility node houses the USOS life support systems.[3] Tranquility also hosts the seven windowed Cupola module. The Cupola is used for Earth observation and robotic operations.[4] The forward facing port of Tranquility is blocked by the station's truss structure, while the aft facing port is free for use. While the nadir port is used by the Cupola, the zenith port is used by some exercise equipment inside the node. The port side port is occupied by the PMA 3, and the starboard port is connected to node 1. The Cupola and Tranquility modules were delivered by STS-130 in February 2010.[5]
Laboratories
Destiny
The Destiny laboratory is the American built laboratory module. It is used for medical, engineering, biotechnological, physics, materials science and Earth science research. Destiny also houses a back-up robotic work station, and was the first of the USOS laboratories to be delivered. It was delivered by STS-98 on February 7, 2001.[6] The Destiny lab is managed by mission control centers in Houston, Texas and Huntsville, Alabama.
Columbus
Columbus is a laboratory module built by the European Space Agency.[7] It is host to scientific research in fluids, biology, medicine, materials and Earth sciences. Columbus also has four external payload locations, used to expose experiments to the vacuum of space. The Columbus module was delivered to the ISS by STS-122 on February 7, 2008.[8] The Columbus Control Center, located in Germany, is responsible for the Columbus module.
Kibo
The Kibo laboratory is the Japanese component of the USOS.[9] Kibo has four main parts: the Kibo lab itself, a pressurized cargo container, an exposed science platform and two robotic arms. The module is unique in that it has a small airlock, which can be used to pass payloads to the robotic arms or astronauts outside the station. The robotic arms are controlled from a work station inside the lab. The lab is used for research in medicine, engineering, biotechnology, physics, materials science and Earth science. The logistics container was the first part of Kibo to arrive. It was delivered by STS-123 in March 2008.[10] The Kibo lab itself was delivered to the ISS by the STS-124 mission in May 2008.[11] The exposed facility was brought to the ISS by the STS-127 mission in July 2009.[12] The JEM Control center in Tsukuba, Japan is responsible for all elements of the Kibo laboratory.
Other Modules
Quest

The Quest Joint Airlock is used to host spacewalks from the USOS segment of the ISS. It consists of two main parts: the equipment lock and the crew lock. The equipment lock is where the Extravehicular Mobility Units are stored and preparations for spacewalks are carried out. The crew lock is depressurized during spacewalks. The Quest airlock was delivered and installed by the STS-104 crew in July 2001.[13]
Leonardo
The Leonardo module, also known as the Permanent Multipurpose Module (PMM), is a module used for stowage space on the ISS. Leonardo is attached to the forward-facing side of the Tranquility node. The PMM was delivered to the ISS by the STS-133 mission in early 2011. Originally the Multi-Purpose Logistics Module (MPLM) Leonardo, it was converted to stay on orbit for an extended period of time prior to being installed on the ISS.
Pressurized Mating Adapter
The Pressurized Mating Adapters (PMA) serve as docking ports on the USOS portion of the ISS. Currently PMA-1 is used to connect the Unity node with the Zarya module on the ISS. Pressurized Mating Adapter-2 is located on the forward end of Harmony, and was used by the Space Shuttle to dock with the ISS. Any future manned American spaceflights to the ISS will use PMA-2. The third Pressurized Mating Adapter is located on the aft end of the Tranquility node. Currently, PMA-3 serves only as a storage location, and serves as a back up to PMA-2. PMA-1 and PMA-2 were delivered with the Unity node on STS-88 in December 1998.[1] The third PMA was delivered by STS-92 on October 11, 2000.[14]
External elements
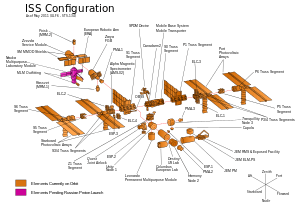
Integrated Truss Structure
The Integrated Truss Structure (ITS) houses vital equipment on the exterior of the ISS.[15] Each segment of truss is given a designation of P or S, indicating whether the segment is on the port or starboard side, and a number which indicates its position on its respective side. The truss system itself consists of 12 total segments—four on each side, and one central segment—which are connected to the ISS by attachment points on the Destiny module.[16] The thirteenth piece, known as the Zenith-1 (Z1) truss segment, is attached to the Unity module, and was originally used to hold the P6 solar arrays to provide power to the USOS. The Z1 segment now houses the Ku-band antennas and serves as a routing point for power and data cables on the exterior of the ISS. The Integrated Truss Structure houses four sets of solar arrays. Each set of solar arrays contains four arrays for a total of 16 solar arrays. Each of the four sets of arrays also has an associated cooling system and radiator for cooling the power supply equipment. The Integrated Truss Structure also houses the main cooling system for the ISS, which consists of two pumps, two radiator arrays, and two ammonia and two nitrogen tank assemblies. There are also several payload attachment points located on the Integrated Truss Structure. These points host the External Stowage Platforms, External Logistics Carriers, Alpha Magnetic Spectrometer and the Mobile Base System for the Canadarm2. The Z1 truss was delivered by the STS-92 mission in October 2000.[14] The P6 segment was installed on STS-97 in December 2000.[17] The S0 truss was delivered to the ISS on STS-110,[18] with the S1 segment following on STS-112.[19] The P1 segment of the truss was brought to the ISS by STS-113,[20] followed by the P3/P4 segment on STS-115,[21] and the P5 segment on STS-116.[22] The S3/S4 truss segment was delivered by STS-117,[23] followed by the S5 segment STS-118.[24] The last component of the truss segment, the S6 segment, was delivered by STS-119.[25]
External Stowage Platform
The External Stowage Platforms (ESP), are a series of platforms that are used to store Orbital Replacement Units (ORU) on the ISS. The ESP's provide power to the ORU's but do not allow command and data handling. External Stowage Platform 1 is located on the port side of the Destiny lab and was delivered on the STS-102 mission in March 2001.[26] ESP-2 is located on the port side of the Quest airlock, and was brought to the ISS by the STS-114 crew in 2005.[27] ESP-3 is located on the Starboard 3 (S3) truss segment and was delivered to the ISS on the STS-118 mission in August 2007.[24]
ExPRESS logistics carrier
The ExPRESS logistics carriers (ELCs) are similar to the External Stowage Platform, but designed to carry more cargo. Unlike the ESPs, the ELCs allow for command and data handling. This allows science experiments to be mounted to the ELCs. ExPRESS Logistics Carriers 1, located on the lower P3 truss, and ELC 2, located on the upper S3 truss, were delivered by the STS-129 mission in November 2009.[28] ELC-3 was brought to the ISS by the STS-134 crew, is located on the upper P3 truss.[29] ELC-4 was delivered and installed on the lower S3 truss segment, during the STS-133 mission.[30]
Alpha Magnetic Spectrometer 2
The Alpha Magnetic Spectrometer (AMS) is a particle physics experiment that is mounted on the S3 truss segment. The AMS is designed to search for dark matter and anti-matter. Five hundred scientists from 56 different institutions and 16 countries participated in the development and construction of the AMS. The Alpha Magnetic Spectrometer was delivered by the STS-134 crew.[29]
Mobile Servicing System
The components of the MSS were supplied by the Canadian Space Agency in conjunction with MDA Space Missions. The Mobile Transporter that carries the Mobile Base System was designed and built by Northrop Grumman under contract with NASA.
Canadarm2
The main component of the mobile servicing system is the Canadarm2, also known as the Space Station Remote Manipulator System (SSRMS). The arm is capable of moving large, heavy payloads that cannot be handled by astronauts during a spacewalk. The arm has a payload capacity of 116,000 kg (256,000 lb), and 7 degrees of freedom.[31] Canadarm2 is also capable of changing where it is stationed and what end is used. There are grapple fixtures for the Candarm2 on the Destiny lab, Harmony node, Unity node and the Mobile Base System. A grapple fixture is installed on the Zarya module, but does not have data cables connected. Once these cables are connected, the Canadarm2 will be able to position itself on the exterior of Zarya and will be able to support Extra-vehicular Activity (EVA) in the vicinity the Russian Orbital Segment (ROS). The Canadarm2 was assembled and installed by the STS-100 crew in early 2001.[32]
Special Purpose Dextrous Manipulator
The Special Purpose Dexterous Manipulator (SPDM), also known as Dextre, is a two armed robot that can be attached to the ISS, the Mobile Base System or Canadarm2. Dextre is capable of performing tasks that would otherwise require an astronaut to perform. These tasks include switching orbital replacement units or moving ORUs from their stowage locations to where they are to be installed. Using Dextre can reduce preparatory time needed to perform certain tasks and afford astronauts the ability to invest more time in the completion of other tasks. Dextre's primary grapple fixture is located on the Destiny lab, but can also be mounted on any powered grapple fixture on the ISS. It has a payload capacity of 600 kg (1,300 lb), and 15 degrees of freedom.[31] Dextre was delivered to the ISS by STS-123.[10]
Mobile Base System
The Mobile Base System (MBS) is a rail car-like device installed on the Integrated Truss Structure of the ISS. It weighs 886 kg (1,953 lb), and has a payload capacity of 20,954 kg (46,196 lb).[33] The MBS can move from the Starboard 3 (S3) to the Port 3 (P3) truss segments and has a top speed of 2.5 cm/s (0.082 ft/s). The MBS has four PDGFs which can be used as mounts for the Canadarm2 and Dextre, as well as a Payload/Orbital Replacement Unit Accommodations (POA), to hold payloads and Orbital Replacement Units (ORUs). The MBS also has a common attach system, to grapple a special capture bar on payloads. It also has its own main computer and video distribution units, and remote power control modules.[34] The MBS was delivered on STS-111 in June 2002.[35]
Enhanced ISS Boom Assembly
The Enhanced ISS Boom Assembly is used to extend the reach of Canadarm2 and provides detailed inspection capability. There are lasers and cameras at the end of the boom able to record at a resolution of a few millimeters. The boom is also fitted with handrails, so that it can assist spacewalkers during EVAs as was done on STS-120 to repair the solar arrays.
See also
- NASA X-38, canceled crew return vehicle
- NASA HL-20/Dream Chaser proposed crew return vehicle
- Russian Orbital Segment
References
- 1 2 "STS-88 Press Kit". NASA. Retrieved 2012-02-06.
- ↑ "STS-120 Press Kit" (PDF). NASA. Retrieved 2012-02-06.
- ↑ "Node 3: a complex architecture". Thales Alenia. Retrieved 2012-02-14.
- ↑ "Cupola: a window over the Earth". Thales Alenia. Retrieved 2012-02-14.
- ↑ "STS-130 Press Kit" (PDF). NASA. Retrieved 2012-02-06.
- ↑ "STS-98 Press Kit". NASA. Retrieved 2012-02-06.
- ↑ "Columbus Laboratory". European Space Agency. Retrieved 2012-02-06.
- ↑ "STS-122 Press Kit" (PDF). NASA. Retrieved 2012-02-06.
- ↑ "Kibo Laboratory". JAXA. Retrieved 2012-02-06.
- 1 2 "STS-123 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-124 Press Kit" (PDF). NASA. Retrieved 2012-02-06.
- ↑ "STS-127 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-104 Press Kit". NASA. Retrieved 2012-02-06.
- 1 2 "STS-92 Press Kit". NASA. Retrieved 2012-02-06.
- ↑ "Integrated Truss Structure". Boeing. Retrieved 2012-02-14.
- ↑ "Space Station Assembly - Integrated Truss Structure". NASA. Retrieved 2012-02-14.
- ↑ "STS-97 Press Kit". NASA. Retrieved 2012-02-12.
- ↑ "STS-110 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-112 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-113 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-115 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-116 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-117 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- 1 2 "STS-118 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-119 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-102 Press Kit". NASA. Retrieved 2012-02-12.
- ↑ "STS-114 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-129 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- 1 2 "STS-134 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- ↑ "STS-133 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
- 1 2 "The Mobile Servicing System". Canadian Space Agency. Retrieved 2012-02-22.
- ↑ "STS-100 Press Kit". NASA. Retrieved 2012-02-12.
- ↑ "Mobile Base System - Backgrounder". Canadian Space Agency. Retrieved 2012-02-22.
- ↑ "Mobile Base System - MBS Design". Canadian Space Agency. Retrieved 2012-02-22.
- ↑ "STS-111 Press Kit" (PDF). NASA. Retrieved 2012-02-12.
External links

| Policy and history |
| ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Robotic programs |
| ||||||||||
| Human spaceflight programs |
| ||||||||||
| Individual featured missions (human and robotic) |
| ||||||||||
| Communications and Navigation | |||||||||||
| NASA lists | |||||||||||
| |||||||||||
| |||||||||||||||||||||||||||
| |||||||||||||||||||||||||||
| Telecommunications |
| ||||||||||||||||||||||||||
Technology demonstrators | |||||||||||||||||||||||||||
| Cancelled and proposed | |||||||||||||||||||||||||||
| Failed | |||||||||||||||||||||||||||
| Canadian astronauts |
| ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Satellites | |||||||||||
| Other space technology | |||||||||||
| Facilities | |||||||||||
| Contractors | |||||||||||
| Related Institutions | |||||||||||
| International Partners | |||||||||||
| Other | |||||||||||