Automation

Automation[1] or automatic control, is the use of various control systems for operating equipment such as machinery, processes in factories, boilers and heat treating ovens, switching on telephone networks, steering and stabilization of ships, aircraft and other applications and vehicles with minimal or reduced human intervention. Some processes have been completely automated.
The biggest benefit of automation is that it saves labor; however, it is also used to save energy and materials and to improve quality, accuracy and precision.
The term automation, inspired by the earlier word automatic (coming from automaton), was not widely used before 1947, when Ford established an automation department.[1] It was during this time that industry was rapidly adopting feedback controllers, which were introduced in the 1930s.[2]
Automation has been achieved by various means including mechanical, hydraulic, pneumatic, electrical, electronic devices and computers, usually in combination. Complicated systems, such as modern factories, airplanes and ships typically use all these combined techniques.
Open-loop and closed-loop (feedback) control
Fundamentally, there are two types of control loop; open loop control, and closed loop (feedback) control.
In open loop control, the control action from the controller is independent of the "process output" (or "controlled process variable"). A good example of this is a central heating boiler controlled only by a timer, so that heat is applied for a constant time, regardless of the temperature of the building. (The control action is the switching on/off of the boiler. The process output is the building temperature).
In closed loop control, the control action from the controller is dependent on the process output. In the case of the boiler analogy this would include a thermostat to monitor the building temperature, and thereby feed back a signal to ensure the controller maintains the building at the temperature set on the thermostat. A closed loop controller therefore has a feedback loop which ensures the controller exerts a control action to give a process output the same as the "Reference input" or "set point". For this reason, closed loop controllers are also called feedback controllers.[3]
The definition of a closed loop control system according to the British Standard Institution is 'a control system possessing monitoring feedback, the deviation signal formed as a result of this feedback being used to control the action of a final control element in such a way as to tend to reduce the deviation to zero.' " [4]
Likewise; "A Feedback Control System is a system which tends to maintain a prescribed relationship of one system variable to another by comparing functions of these variables and using the difference as a means of control.'"[5]
The advanced type of automation that revolutionized manufacturing, aircraft, communications and other industries, is feedback control, which is usually continuous and involves taking measurements using a sensor and making calculated adjustments to keep the measured variable within a set range.[6] The theoretical basis of closed loop automation is control theory.
Control actions
The control action is the form of the controller output action.
Discrete control (on/off)
One of the simplest types of control is on-off control. An example is the thermostat used on household appliances which either opens or closes an electrical contact. (Thermostats were originally developed as true feedback-control mechanisms rather than the on-off common household appliance thermostat.)
Sequence control, in which a programmed sequence of discrete operations is performed, often based on system logic that involves system states. An elevator control system is an example of sequence control.
PID controller
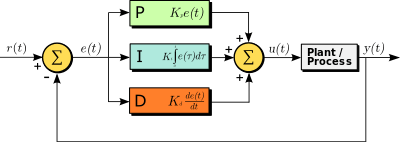
A proportional–integral–derivative controller (PID controller) is a control loop feedback mechanism (controller) widely used in industrial control systems.
A PID controller continuously calculates an error value as the difference between a desired setpoint and a measured process variable and applies a correction based on proportional, integral, and derivative terms, respectively (sometimes denoted P, I, and D) which give their name to the controller type.

The theoretical understanding and application dates from the 1920s, and they are implemented in nearly all analogue control systems; originally in mechanical controllers, and then using discrete electronics and latterly in industrial process computers.
Sequential control and logical sequence or system state control
Sequential control may be either to a fixed sequence or to a logical one that will perform different actions depending on various system states. An example of an adjustable but otherwise fixed sequence is a timer on a lawn sprinkler.
| State Abstraction | |
|---|---|
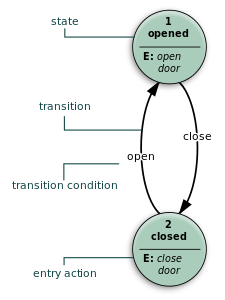 This state diagram shows how UML can be used for designing a door system that can only be opened and closed | |
States refer to the various conditions that can occur in a use or sequence scenario of the system. An example is an elevator, which uses logic based on the system state to perform certain actions in response to its state and operator input. For example, if the operator presses the floor n button, the system will respond depending on whether the elevator is stopped or moving, going up or down, or if the door is open or closed, and other conditions.[7]
An early development of sequential control was relay logic, by which electrical relays engage electrical contacts which either start or interrupt power to a device. Relays were first used in telegraph networks before being developed for controlling other devices, such as when starting and stopping industrial-sized electric motors or opening and closing solenoid valves. Using relays for control purposes allowed event-driven control, where actions could be triggered out of sequence, in response to external events. These were more flexible in their response than the rigid single-sequence cam timers. More complicated examples involved maintaining safe sequences for devices such as swing bridge controls, where a lock bolt needed to be disengaged before the bridge could be moved, and the lock bolt could not be released until the safety gates had already been closed.
The total number of relays, cam timers and drum sequencers can number into the hundreds or even thousands in some factories. Early programming techniques and languages were needed to make such systems manageable, one of the first being ladder logic, where diagrams of the interconnected relays resembled the rungs of a ladder. Special computers called programmable logic controllers were later designed to replace these collections of hardware with a single, more easily re-programmed unit.
In a typical hard wired motor start and stop circuit (called a control circuit) a motor is started by pushing a "Start" or "Run" button that activates a pair of electrical relays. The "lock-in" relay locks in contacts that keep the control circuit energized when the push button is released. (The start button is a normally open contact and the stop button is normally closed contact.) Another relay energizes a switch that powers the device that throws the motor starter switch (three sets of contacts for three phase industrial power) in the main power circuit. Large motors use high voltage and experience high in-rush current, making speed important in making and breaking contact. This can be dangerous for personnel and property with manual switches. The "lock in" contacts in the start circuit and the main power contacts for the motor are held engaged by their respective electromagnets until a "stop" or "off" button is pressed, which de-energizes the lock in relay.[8]
Commonly interlocks are added to a control circuit. Suppose that the motor in the example is powering machinery that has a critical need for lubrication. In this case an interlock could be added to insure that the oil pump is running before the motor starts. Timers, limit switches and electric eyes are other common elements in control circuits.
Solenoid valves are widely used on compressed air or hydraulic fluid for powering actuators on mechanical components. While motors are used to supply continuous rotary motion, actuators are typically a better choice for intermittently creating a limited range of movement for a mechanical component, such as moving various mechanical arms, opening or closing valves, raising heavy press rolls, applying pressure to presses.
Computer control
Computers can perform both sequential control and feedback control, and typically a single computer will do both in an industrial application. Programmable logic controllers (PLCs) are a type of special purpose microprocessor that replaced many hardware components such as timers and drum sequencers used in relay logic type systems. General purpose process control computers have increasingly replaced stand alone controllers, with a single computer able to perform the operations of hundreds of controllers. Process control computers can process data from a network of PLCs, instruments and controllers in order to implement typical (such as PID) control of many individual variables or, in some cases, to implement complex control algorithms using multiple inputs and mathematical manipulations. They can also analyze data and create real time graphical displays for operators and run reports for operators, engineers and management.
Control of an automated teller machine (ATM) is an example of an interactive process in which a computer will perform a logic derived response to a user selection based on information retrieved from a networked database. The ATM process has similarities with other online transaction processes. The different logical responses are called scenarios. Such processes are typically designed with the aid of use cases and flowcharts, which guide the writing of the software code.
History
The earliest feedback control mechanism was the thermostat invented in 1620 by the Dutch scientist Cornelius Drebbel. (Note: Early thermostats were temperature regulators or controlers rather than the on-off mechanisms common in household appliances.) Another control mechanism was used to tent the sails of windmills. It was patented by Edmund Lee in 1745.[9] Also in 1745, Jacques de Vaucanson invented the first automated loom.
In 1771 Richard Arkwright invented the first fully automated spinning mill driven by water power, known at the time as the water frame.[10]
The centrifugal governor, which was invented by Christian Huygens in the seventeenth century, was used to adjust the gap between millstones.[11][12][13] The centrifugal governor was also used in the automatic flour mill developed by Oliver Evans in 1785, making it the first completely automated industrial process. The governor was adopted by James Watt for use on a steam engine in 1788 after Watt’s partner Boulton saw one at a flour mill Boulton & Watt were building.[9]
The governor could not actually hold a set speed; the engine would assume a new constant speed in response to load changes. The governor was able to handle smaller variations such as those caused by fluctuating heat load to the boiler. Also, there was a tendency for oscillation whenever there was a speed change. As a consequence, engines equipped with this governor were not suitable for operations requiring constant speed, such as cotton spinning.[9]
Several improvements to the governor, plus improvements to valve cut-off timing on the steam engine, made the engine suitable for most industrial uses before the end of the 19th century. Advances in the steam engine stayed well ahead of science, both thermodynamics and control theory.[9]
The governor received relatively little scientific attention until James Clerk Maxwell published a paper that established the beginning of a theoretical basis for understanding control theory. Development of the electronic amplifier during the 1920s, which was important for long distance telephony, required a higher signal to noise ratio, which was solved by negative feedback noise cancellation. This and other telephony applications contributed to control theory. Military applications during the Second World War that contributed to and benefited from control theory were fire-control systems and aircraft controls. The word "automation" itself was coined in the 1940s by General Electric.[14] The so-called classical theoretical treatment of control theory dates to the 1940s and 1950s.[6]
Relay logic was introduced with factory electrification, which underwent rapid adaption from 1900 though the 1920s. Central electric power stations were also undergoing rapid growth and operation of new high pressure boilers, steam turbines and electrical substations created a large demand for instruments and controls.
Central control rooms became common in the 1920s, but as late as the early 1930s, most process control was on-off. Operators typically monitored charts drawn by recorders that plotted data from instruments. To make corrections, operators manually opened or closed valves or turned switches on or off. Control rooms also used color coded lights to send signals to workers in the plant to manually make certain changes.[15]
Controllers, which were able to make calculated changes in response to deviations from a set point rather than on-off control, began being introduced the 1930s. Controllers allowed manufacturing to continue showing productivity gains to offset the declining influence of factory electrification.[16]
Factory productivity was greatly increased by electrification in the 1920s. Manufacturing productivity growth fell from 5.2%/yr 1919-29 to 2.76%/yr 1929-41. Field notes that spending on non-medical instruments increased significantly from 1929–33 and remained strong thereafter.
In 1959 Texaco’s Port Arthur refinery became the first chemical plant to use digital control.[17] Conversion of factories to digital control began to spread rapidly in the 1970s as the price of computer hardware fell.
Significant applications
The automatic telephone switchboard was introduced in 1892 along with dial telephones.[18] By 1929, 31.9% of the Bell system was automatic. Automatic telephone switching originally used vacuum tube amplifiers and electro-mechanical switches, which consumed a large amount of electricity. Call volume eventually grew so fast that it was feared the telephone system would consume all electricity production, prompting Bell Labs to begin research on the transistor.[19]
The logic performed by telephone switching relays was the inspiration for the digital computer. The first commercially successful glass bottle blowing machine was an automatic model introduced in 1905.[20] The machine, operated by a two-man crew working 12-hour shifts, could produce 17,280 bottles in 24 hours, compared to 2,880 bottles made by a crew of six men and boys working in a shop for a day. The cost of making bottles by machine was 10 to 12 cents per gross compared to $1.80 per gross by the manual glassblowers and helpers.
Sectional electric drives were developed using control theory. Sectional electric drives are used on different sections of a machine where a precise differential must be maintained between the sections. In steel rolling, the metal elongates as it passes through pairs of rollers, which must run at successively faster speeds. In paper making the paper sheet shrinks as it passes around steam heated drying arranged in groups, which must run at successively slower speeds. The first application of a sectional electric drive was on a paper machine in 1919.[21] One of the most important developments in the steel industry during the 20th century was continuous wide strip rolling, developed by Armco in 1928.[22]

Before automation many chemicals were made in batches. In 1930, with the widespread use of instruments and the emerging use of controllers, the founder of Dow Chemical Co. was advocating continuous production.[23]
Self-acting machine tools that displaced hand dexterity so they could be operated by boys and unskilled laborers were developed by James Nasmyth in the 1840s.[24] Machine tools were automated with Numerical control (NC) using punched paper tape in the 1950s. This soon evolved into computerized numerical control (CNC).
Today extensive automation is practiced in practically every type of manufacturing and assembly process. Some of the larger processes include electrical power generation, oil refining, chemicals, steel mills, plastics, cement plants, fertilizer plants, pulp and paper mills, automobile and truck assembly, aircraft production, glass manufacturing, natural gas separation plants, food and beverage processing, canning and bottling and manufacture of various kinds of parts. Robots are especially useful in hazardous applications like automobile spray painting. Robots are also used to assemble electronic circuit boards. Automotive welding is done with robots and automatic welders are used in applications like pipelines.
Advantages and disadvantages
The main advantages of automation are:
- Increased throughput or productivity.
- Improved quality or increased predictability of quality.
- Improved robustness (consistency), of processes or product.
- Increased consistency of output.
- Reduced direct human labor costs and expenses.
The following methods are often employed to improve productivity, quality, or robustness.
- Install automation in operations to reduce cycle time.
- Install automation where a high degree of accuracy is required.
- Replacing human operators in tasks that involve hard physical or monotonous work.[25]
- Replacing humans in tasks done in dangerous environments (i.e. fire, space, volcanoes, nuclear facilities, underwater, etc.)
- Performing tasks that are beyond human capabilities of size, weight, speed, endurance, etc.
- Reduces operation time and work handling time significantly.
- Frees up workers to take on other roles.
- Provides higher level jobs in the development, deployment, maintenance and running of the automated processes.
The main disadvantages of automation are:
- Security Threats/Vulnerability: An automated system may have a limited level of intelligence, and is therefore more susceptible to committing errors outside of its immediate scope of knowledge (e.g., it is typically unable to apply the rules of simple logic to general propositions).
- Unpredictable/excessive development costs: The research and development cost of automating a process may exceed the cost saved by the automation itself.
- High initial cost: The automation of a new product or plant typically requires a very large initial investment in comparison with the unit cost of the product, although the cost of automation may be spread among many products and over time.
In manufacturing, the purpose of automation has shifted to issues broader than productivity, cost, and time.
Lights out manufacturing
Lights out manufacturing is when a production system is 100% or near to 100% automated (not hiring any workers). In order to eliminate the need for labor costs altogether.
Health and environment
The costs of automation to the environment are different depending on the technology, product or engine automated. There are automated engines that consume more energy resources from the Earth in comparison with previous engines and those that do the opposite too. Hazardous operations, such as oil refining, the manufacturing of industrial chemicals, and all forms of metal working, were always early contenders for automation.
Convertibility and turnaround time
Another major shift in automation is the increased demand for flexibility and convertibility in manufacturing processes. Manufacturers are increasingly demanding the ability to easily switch from manufacturing Product A to manufacturing Product B without having to completely rebuild the production lines. Flexibility and distributed processes have led to the introduction of Automated Guided Vehicles with Natural Features Navigation.
Digital electronics helped too. Former analogue-based instrumentation was replaced by digital equivalents which can be more accurate and flexible, and offer greater scope for more sophisticated configuration, parametrization and operation. This was accompanied by the fieldbus revolution which provided a networked (i.e. a single cable) means of communicating between control systems and field level instrumentation, eliminating hard-wiring.
Discrete manufacturing plants adopted these technologies fast. The more conservative process industries with their longer plant life cycles have been slower to adopt and analogue-based measurement and control still dominates. The growing use of Industrial Ethernet on the factory floor is pushing these trends still further, enabling manufacturing plants to be integrated more tightly within the enterprise, via the internet if necessary. Global competition has also increased demand for Reconfigurable Manufacturing Systems.
Automation tools
Engineers can now have numerical control over automated devices. The result has been a rapidly expanding range of applications and human activities. Computer-aided technologies (or CAx) now serve as the basis for mathematical and organizational tools used to create complex systems. Notable examples of CAx include Computer-aided design (CAD software) and Computer-aided manufacturing (CAM software). The improved design, analysis, and manufacture of products enabled by CAx has been beneficial for industry.[26]
Information technology, together with industrial machinery and processes, can assist in the design, implementation, and monitoring of control systems. One example of an industrial control system is a programmable logic controller (PLC). PLCs are specialized hardened computers which are frequently used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events.[27]

Human-machine interfaces (HMI) or computer human interfaces (CHI), formerly known as man-machine interfaces, are usually employed to communicate with PLCs and other computers. Service personnel who monitor and control through HMIs can be called by different names. In industrial process and manufacturing environments, they are called operators or something similar. In boiler houses and central utilities departments they are called stationary engineers.[28]
Different types of automation tools exist:
- ANN - Artificial neural network
- DCS - Distributed Control System
- HMI - Human Machine Interface
- SCADA - Supervisory Control and Data Acquisition
- PLC - Programmable Logic Controller
- Instrumentation
- Motion control
- Robotics
When it comes to Factory Automation, Host Simulation Software (HSS) is a commonly used testing tool that is used to test the equipment software. HSS is used to test equipment performance with respect to Factory Automation standards (timeouts, response time, processing time).[29]
Limitations to automation
- Current technology is unable to automate all the desired tasks.
- Many operations using automation have large amounts of invested capital and produce high volumes of product, making malfunctions extremely costly and potentially hazardous. Therefore, some personnel are needed to insure that the entire system functions properly and that safety and product quality are maintained.
- As a process becomes increasingly automated, there is less and less labor to be saved or quality improvement to be gained. This is an example of both diminishing returns and the logistic function.
- As more and more processes become automated, there are fewer remaining non-automated processes. This is an example of exhaustion of opportunities. New technological paradigms may however set new limits that surpass the previous limits.
Current limitations
Many roles for humans in industrial processes presently lie beyond the scope of automation. Human-level pattern recognition, language comprehension, and language production ability are well beyond the capabilities of modern mechanical and computer systems (but see Watson (computer)). Tasks requiring subjective assessment or synthesis of complex sensory data, such as scents and sounds, as well as high-level tasks such as strategic planning, currently require human expertise. In many cases, the use of humans is more cost-effective than mechanical approaches even where automation of industrial tasks is possible. Overcoming these obstacles is a theorized path to post-scarcity economics.
Paradox of Automation
The Paradox of Automation says that the more efficient the automated system, the more crucial the human contribution of the operators. Humans are less involved, but their involvement becomes more critical.
If an automated system has an error, it will multiply that error until it’s fixed or shut down. This is where human operators come in.[30]
A fatal example of this was Air France Flight 447, where a failure of automation put the pilots into a manual situation they were not prepared for.[31]
Recent and emerging applications

Automated retail
Food and drink
The food retail industry has started to apply automation to the ordering process; McDonald's has introduced touch screen ordering and payment systems in many of its restaurants, reducing the need for as many cashier employees.[32] The University of Texas at Austin has introduced fully automated cafe retail locations.[33] Some Cafes and restaurants have utilized mobile and tablet "apps" to make the ordering process more efficient by customers ordering and paying on their device.[34][35] Some restaurants have automated food delivery to customers tables using a Conveyor belt system. The use of robots is sometimes employed to replace waiting staff.[36]
Stores
Many Supermarkets and even smaller stores are rapidly introducing Self checkout systems reducing the need for employing checkout workers.
Online shopping could be considered a form of automated retail as the payment and checkout are through an automated Online transaction processing system. Other forms of automation can also be an integral part of online shopping, for example the deployment of automated warehouse robotics such as that applied by Amazon using Kiva Systems.
Automated mining
Involves the removal of human labor from the mining process.[37] The mining industry is currently in the transition towards Automation. Currently it can still require a large amount of human capital, particularly in the third world where labor costs are low so there is less incentive for increasing efficiency through automation.
Automated video surveillance
The Defense Advanced Research Projects Agency (DARPA) started the research and development of automated visual surveillance and monitoring (VSAM) program, between 1997 and 1999, and airborne video surveillance (AVS) programs, from 1998 to 2002. Currently, there is a major effort underway in the vision community to develop a fully automated tracking surveillance system. Automated video surveillance monitors people and vehicles in real time within a busy environment. Existing automated surveillance systems are based on the environment they are primarily designed to observe, i.e., indoor, outdoor or airborne, the amount of sensors that the automated system can handle and the mobility of sensor, i.e., stationary camera vs. mobile camera. The purpose of a surveillance system is to record properties and trajectories of objects in a given area, generate warnings or notify designated authority in case of occurrence of particular events.[38]
Automated highway systems
As demands for safety and mobility have grown and technological possibilities have multiplied, interest in automation has grown. Seeking to accelerate the development and introduction of fully automated vehicles and highways, the United States Congress authorized more than $650 million over six years for intelligent transport systems (ITS) and demonstration projects in the 1991 Intermodal Surface Transportation Efficiency Act (ISTEA). Congress legislated in ISTEA that "the Secretary of Transportation shall develop an automated highway and vehicle prototype from which future fully automated intelligent vehicle-highway systems can be developed. Such development shall include research in human factors to ensure the success of the man-machine relationship. The goal of this program is to have the first fully automated highway roadway or an automated test track in operation by 1997. This system shall accommodate installation of equipment in new and existing motor vehicles." [ISTEA 1991, part B, Section 6054(b)].
Full automation commonly defined as requiring no control or very limited control by the driver; such automation would be accomplished through a combination of sensor, computer, and communications systems in vehicles and along the roadway. Fully automated driving would, in theory, allow closer vehicle spacing and higher speeds, which could enhance traffic capacity in places where additional road building is physically impossible, politically unacceptable, or prohibitively expensive. Automated controls also might enhance road safety by reducing the opportunity for driver error, which causes a large share of motor vehicle crashes. Other potential benefits include improved air quality (as a result of more-efficient traffic flows), increased fuel economy, and spin-off technologies generated during research and development related to automated highway systems.[39]
Automated waste management

Automated waste collection trucks prevent the need for as many workers as well as easing the level of labor required to provide the service.[40]
Home automation
Home automation (also called domotics) designates an emerging practice of increased automation of household appliances and features in residential dwellings, particularly through electronic means that allow for things impracticable, overly expensive or simply not possible in recent past decades.
Laboratory automation
Automation is essential for many scientific and clinical applications.[41] Therefore, automation has been extensively employed in laboratories. From as early as 1980 fully automated laboratories have already been working.[42] However, automation has not become widespread in laboratories due to its high cost. This may change with the ability of integrating low-cost devices with standard laboratory equipment.[43][44] Autosamplers are common devices used in laboratory automation.
Industrial automation
Industrial automation deals primarily with the automation of manufacturing, quality control and material handling processes. General purpose controllers for industrial processes include Programmable logic controllers, stand-alone I/O modules, and computers. Industrial automation is to replace the decision making of humans and manual command-response activities with the use of mechanized equipment and logical programming commands. One trend is increased use of Machine vision to provide automatic inspection and robot guidance functions, another is a continuing increase in the use of robots. Industrial automation is simply done at the industrial level.
Energy efficiency in industrial processes has become a higher priority. Semiconductor companies like Infineon Technologies are offering 8-bit micro-controller applications for example found in motor controls, general purpose pumps, fans, and ebikes to reduce energy consumption and thus increase efficiency.
Advantages
- Replaces hard physical or monotonous work [45]
- Tasks in hazardous environments, such as extreme temperatures, or atmospheres that are radioactive or toxic can be done by machines
- Faster production and cheaper labor costs
- Automation can be maintained with simple quality checks.
- Can perform tasks beyond human capabilities.
Disadvantages
- As of now, not all tasks can be automated
- Some tasks are more expensive to automate
- Initial costs are high
- Failure to maintain a system could result in the loss of the product
Industrial Robotics

Industrial robotics is a sub-branch in the industrial automation that aids in various manufacturing processes. Such manufacturing processes include; machining, welding, painting, assembling and material handling to name a few.[46] Industrial robots utilizes various mechanical, electrical as well as software systems to allow for high precision, accuracy and speed that far exceeds any human performance. The birth of industrial robot came shortly after World War II as United States saw the need for a quicker way to produce industrial and consumer goods.[47] Servos, digital logic and solid state electronics allowed engineers to build better and faster systems and overtime these systems were improved and revised to the point where a single robot is capable of running 24 hours a day with little or no maintenance.
Programmable Logic Controllers
Industrial automation incorporates programmable logic controllers in the manufacturing process. Programmable logic controllers (PLCs) use a processing system which allows for variation of controls of inputs and outputs using simple programming. PLCs make use of programmable memory, storing instructions and functions like logic, sequencing, timing, counting, etc. Using a logic based language, a PLC can receive a variety of inputs and return a variety of logical outputs, the input devices being sensors and output devices being motors, valves, etc. PLCs are similar to computers, however, while computers are optimized for calculations, PLCs are optimized for control task and use in industrial environments. They are built so that only basic logic-based programming knowledge is needed and to handle vibrations, high temperatures, humidity and noise. The greatest advantage PLCs offer is their flexibility. With the same basic controllers, a PLC can operate a range of different control systems. PLCs make it unnecessary to rewire a system to change the control system. This flexibility leads to a cost-effective system for complex and varied control systems.[48]
Agent-assisted automation
Agent-assisted automation refers to automation used by call center agents to handle customer inquiries. There are two basic types: desktop automation and automated voice solutions. Desktop automation refers to software programming that makes it easier for the call center agent to work across multiple desktop tools. The automation would take the information entered into one tool and populate it across the others so it did not have to be entered more than once, for example. Automated voice solutions allow the agents to remain on the line while disclosures and other important information is provided to customers in the form of pre-recorded audio files. Specialized applications of these automated voice solutions enable the agents to process credit cards without ever seeing or hearing the credit card numbers or CVV codes[49]
The key benefit of agent-assisted automation is compliance and error-proofing. Agents are sometimes not fully trained or they forget or ignore key steps in the process. The use of automation ensures that what is supposed to happen on the call actually does, every time.
Relationship to unemployment
Research by the Oxford Martin School showed that employees engaged in "tasks following well-defined procedures that can easily be performed by sophisticated algorithms" are at risk of displacement. The study, published in 2013, shows that automation can affect both skilled and unskilled work and both high and low-paying occupations; however, low-paid physical occupations are most at risk.[50] However, according to a study published in McKinsey Quarterly[51] in 2015 the impact of computerization in most cases is not replacement of employees but automation of portions of the tasks they perform.[52]
Based on a formula by Gilles Saint-Paul, an economist at Toulouse 1 University, the demand for unskilled human capital declines at a slower rate than the demand for skilled human capital increases.[53] In the long run and for society as a whole it has led to cheaper products, lower average work hours, and new industries forming (I.e, robotics industries, computer industries, design industries). These new industries provide many high salary skill based jobs to the economy.
See also
- Accelerating change
- Artificial intelligence – automated thought
- Automatic Tool Changer
- Automation protocols
- Automation Technician
- Autonomous car
- BELBIC
- Controller
- Conveyor
- Conveyor belt
- Cybernetics
- EnOcean
- Feedforward Control
- Hardware architect
- Hardware architecture
- Industrial engineering
- International Society of Automation
- Machine to Machine
- Mobile manipulator
- Multi-agent system
- Odo J. Struger
- OLE for process control
- OPC Foundation
- Pharmacy automation
- Pneumatics automation
- Process control
- Retraining
- Robotics
- Run Book Automation (RBA)
- Sensor-based sorting
- Stepper motor
- Support automation
- System integration
- Systems architect
- Systems architecture
- Luddite
- Mechatronics
- mechanisation
- deskilling
References
- 1 2 Rifkin, Jeremy (1995). The End of Work: The Decline of the Global Labor Force and the Dawn of the Post-Market Era. Putnam Publishing Group. pp. 66, 75. ISBN 0-87477-779-8.
- ↑ Bennett, S. (1993). A History of Control Engineering 1930-1955. London: Peter Peregrinus Ltd. On behalf of the Institution of Electrical Engineers. ISBN 0-86341-280-7.
- ↑ "Feedback and control systems" - JJ Di Steffano, AR Stubberud, IJ Williams. Schaums outline series, McGraw-Hill 1967
- ↑ Mayr, Otto (1970). The Origins of Feedback Control. Clinton, MA USA: The Colonial Press, Inc.
- ↑ Mayr, Otto (1969). The Origins of Feedback Control. Clinton, MA USA: The Colonial Press, Inc.
- 1 2 Bennett 1993
- ↑ The elevator example is commonly used in programming texts, such as Unified modeling language
- ↑ "MOTOR STARTERS START STOPS HAND OFF AUTO".
- 1 2 3 4 Bennett 1979
- ↑ Liu, Tessie P. (1 January 1994). "The Weaver's Knot: The Contradictions of Class Struggle and Family Solidarity in Western France, 1750-1914". Cornell University Press – via Google Books.
- ↑ http://www.princeton.edu/~hos/Mahoney/clarklec.html
- ↑ https://books.google.co.uk/books?id=iwbWCgAAQBAJ&pg=PA36&lpg=PA36&dq=Huygens+"Centrifugal+Governor"&source=bl&ots=bCI9UtH159&sig=XPNjHVZDF_vckvTnwnUd8-XKWsg&hl=en&sa=X&ved=0ahUKEwiOvafXvaHPAhVHXRoKHdJNAOoQ6AEILDAD#v=onepage&q=Huygens%20%22Centrifugal%20Governor%22&f=false
- ↑ Bennett, S. (1979). A History of Control Engineering 1800-1930. London: Peter Peregrinus Ltd. pp. 47, 266. ISBN 0-86341-047-2.
- ↑ See Wiktionary on "[[wikt:automation|]]"
- ↑ Bennett 1993, pp. 31
- ↑ Field, Alexander J. (2011). A Great Leap Forward: 1930s Depression and U.S. Economic Growth. New Haven, London: Yale University Press. ISBN 978-0-300-15109-1.
- ↑ Rifkin 1995
- ↑ Jerome, Harry (1934). Mechanization in Industry, National Bureau of Economic Research (PDF). p. 158.
- ↑ Constable, George; Somerville, Bob (1964). A Century of Innovation: Twenty Engineering Achievements That Transformed Our Lives. Joseph Henry Press. ISBN 0309089085.
- ↑ "The American Society of Mechanical Engineers Designates the Owens "AR" Bottle Machine as an International Historic Engineering Landmark" (PDF). 1983.
- ↑ Bennett 1993, pp. 7
- ↑ Landes, David. S. (1969). The Unbound Prometheus: Technological Change and Industrial Development in Western Europe from 1750 to the Present. Cambridge, New York: Press Syndicate of the University of Cambridge. p. 475. ISBN 0-521-09418-6.
- ↑ Bennett 1993, pp. 65Note 1
- ↑ Musson; Robinson (1969). Science and Technology in the Industrial Revolution. University of Toronto Press.
- ↑ Process automation, retrieved on 20.02.2010 Archived May 17, 2013, at the Wayback Machine.
- ↑ "Engineers' CAx education—it's not only CAD". doi:10.1016/j.cad.2004.02.011.
- ↑ "Automation - Definitions from Dictionary.com". dictionary.reference.com. Archived from the original on 29 April 2008. Retrieved 2008-04-22.
- ↑ Stationary Engineers and Boiler Operators
- ↑ http://www.hcltech.com/sites/default/files/effective_host_simulation.pdf
- ↑ Kaufman, Josh. "Paradox of Automation - The Personal MBA".
- ↑ "Children of the Magenta (Automation Paradox, pt. 1) - 99% Invisible".
- ↑ Archived May 24, 2011, at the Wayback Machine.
- ↑ Automation Comes To The Coffeehouse With Robotic Baristas. Singularity Hub. Retrieved on 2013-07-12.
- ↑ Ordering at the table using your Smartphone. ICRTouch. Retrieved on 2013-07-12.
- ↑ New Pizza Express app lets diners pay bill using iPhone. Bighospitality.co.uk. Retrieved on 2013-07-12.
- ↑ Wheelie: Toshiba's new robot is cute, autonomous and maybe even useful (video). TechCrunch (2010-03-12). Retrieved on 2013-07-12.
- ↑ Rio to trial automated mining at The Australian
- ↑ Javed, O, & Shah, M. (2008). Automated multi-camera surveillance. City of Publication: Springer-Verlag New York Inc.
- ↑ Menzies, Thomas. R. National Automated Highway System Research Program A review. 253. Washington D.C.: Transportation Research Board, 1998. 2-50.
- ↑ Hepker, Aaron. (2012-11-27) Automated Garbage Trucks Hitting Cedar Rapids Streets | KCRG-TV9 | Cedar Rapids, Iowa News, Sports, and Weather | Local News Archived January 16, 2013, at the Wayback Machine.. Kcrg.com. Retrieved on 2013-07-12.
- ↑ Carvalho, Matheus (2017). Practical Laboratory Automation: Made Easy with AutoIt. Wiley VCH. ISBN 978-3-527-34158-0.
- ↑ Boyd, James (2002-01-18). "Robotic Laboratory Automation". Science. 295 (5554): 517–518. doi:10.1126/science.295.5554.517. ISSN 0036-8075. PMID 11799250.
- ↑ Carvalho, Matheus C. (2013-08-01). "Integration of Analytical Instruments with Computer Scripting". Journal of Laboratory Automation. 18 (4): 328–333. doi:10.1177/2211068213476288. ISSN 2211-0682. PMID 23413273.
- ↑ Pearce, Joshua M. (2014-01-01). Chapter 1 - Introduction to Open-Source Hardware for Science. Boston: Elsevier. pp. 1–11. doi:10.1016/b978-0-12-410462-4.00001-9. ISBN 9780124104624.
- ↑ Lamb, Frank (2013). Industrial Automation: Hands on. pp. 1–4.
- ↑ Shell, Richard (2000). Handbook of Industrial Automation. p. 46.
- ↑ Kurfess, Thomas (2005). Robotics and Automation Handbook. p. 5.
- ↑ Bolten, William (2009). Programmable Logic Controllers (5th Edition). p. 3.
- ↑ Adsit, Dennis (February 21, 2011). "Error-proofing strategies for managing call center fraud". isixsigma.com.
- ↑ Carl Benedikt Frey; Michael Osborne (September 2013). "The Future of Employment: How susceptible are jobs to computerisation?" (publication). Oxford Martin School. Retrieved November 7, 2015.
- ↑ Michael Chui; James Manyika; Mehdi Miremadi (November 2015). "Four fundamentals of workplace automation As the automation of physical and knowledge work advances, many jobs will be redefined rather than eliminated—at least in the short term.". McKinsey Quarterly. Retrieved November 7, 2015.
Very few occupations will be automated in their entirety in the near or medium term. Rather, certain activities are more likely to be automated....
- ↑ Steve Lohr (November 6, 2015). "Automation Will Change Jobs More Than Kill Them". The New York Times. Retrieved November 7, 2015.
technology-driven automation will affect most every occupation and can change work, according to new research from McKinsey
- ↑ Saint-Paul, G. (2008). Innovation and inequality:How does technical progress affect workers? Princeton, New Jersey: Princeton University Press.
Further reading
- Bennett, S. (1993). A History of Control Engineering 1930-1955. London: Peter Peregrinus Ltd. On behalf of the Institution of Electrical Engineers. ISBN 0-86341-280-7.
- Dunlop, John T. (ed.) (1962), Automation and Technological Change: Report of the Twenty-first American Assembly, Englewood Cliffs, NJ, USA: Prentice-Hall.* Dunlop, John T. (ed.) (1962), Automation and Technological Change: Report of the Twenty-first American Assembly, Englewood Cliffs, NJ, USA: Prentice-Hall.
- Ouellette, Robert (1983), Automation Impacts on Industry, Ann Arbor, MI, USA: Ann Arbor Science Publishers, ISBN 978-0-250-40609-8.
- Trevathan, Vernon L. (ed.) (2006), A Guide to the Automation Body of Knowledge (2nd ed.), Research Triangle Park, NC, USA: International Society of Automation, ISBN 978-1-55617-984-6, archived from the original on 2008-07-04.
- Frohm, Jorgen (2008), Levels of Automation in Production Systems, Chalmers University of Technology, ISBN 978-91-7385-055-1.
External links
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||