Buckling
In science, buckling is a mathematical instability, leading to a failure mode.
Buckling is characterized by a sudden sideways failure of a structural member subjected to high compressive stress, where the compressive stress at the point of failure is less than the ultimate compressive stress that the material is capable of withstanding. Mathematical analysis of buckling often makes use of an "artificial" axial load eccentricity that introduces a secondary bending moment that is not a part of the primary applied forces being studied. As an applied load is increased on a member, such as a column, it will ultimately become large enough to cause the member to become unstable and is said to have buckled. Further load will cause significant and somewhat unpredictable deformations, possibly leading to complete loss of the member's load-carrying capacity. If the deformations that follow buckling are not catastrophic the member will continue to carry the load that caused it to buckle. If the buckled member is part of a larger assemblage of components such as a building, any load applied to the structure beyond that which caused the member to buckle will be redistributed within the structure.
Theoretically, buckling is caused by a bifurcation in the solution to the equations of static equilibrium. At a certain stage under an increasing load, further load is able to be sustained in one of two states of equilibrium: a purely compressed state (with no lateral deviation) or a laterally-deformed state.
Columns
The ratio of the effective length of a column to the least radius of gyration of its cross section is called the slenderness ratio (sometimes expressed with the Greek letter lambda, λ). This ratio affords a means of classifying columns. Slenderness ratio is important for design considerations. All the following are approximate values used for convenience.
- A short steel column is one whose slenderness ratio does not exceed 50; an intermediate length steel column has a slenderness ratio ranging from about 50 to 200, and its behavior is dominated by the strength limit of the material, while a long steel column may be assumed to have a slenderness ratio greater than 200 and its behavior is dominated by the modulus of elasticity of the material.
- A short concrete column is one having a ratio of unsupported length to least dimension of the cross section equal to or less than 10. If the ratio is greater than 10, it is considered a long column (sometimes referred to as a slender column).
- Timber columns may be classified as short columns if the ratio of the length to least dimension of the cross section is equal to or less than 10. The dividing line between intermediate and long timber columns cannot be readily evaluated. One way of defining the lower limit of long timber columns would be to set it as the smallest value of the ratio of length to least cross sectional area that would just exceed a certain constant K of the material. Since K depends on the modulus of elasticity and the allowable compressive stress parallel to the grain, it can be seen that this arbitrary limit would vary with the species of the timber. The value of K is given in most structural handbooks.
If the load on a column is applied through the center of gravity (centroid) of its cross section, it is called an axial load. A load at any other point in the cross section is known as an eccentric load. A short column under the action of an axial load will fail by direct compression before it buckles, but a long column loaded in the same manner will fail by buckling (bending), the buckling effect being so large that the effect of the axial load may be neglected. The intermediate-length column will fail by a combination of direct compressive stress and bending.
In 1757, mathematician Leonhard Euler derived a formula that gives the maximum axial load that a long, slender, ideal column can carry without buckling. An ideal column is one that is perfectly straight, homogeneous, and free from initial stress. The maximum load, sometimes called the critical load, causes the column to be in a state of unstable equilibrium; that is, the introduction of the slightest lateral force will cause the column to fail by buckling. The formula derived by Euler for columns with no consideration for lateral forces is given below. However, if lateral forces are taken into consideration the value of critical load remains approximately the same. Euler's critical load is given by the formula:[1]

where
- = maximum or critical force (vertical load on column),
- = modulus of elasticity,
- = area moment of inertia of the cross section of the rod,
- = unsupported length of column,
- = column effective length factor, whose value depends on the conditions of end support of the column, as follows.
- For both ends pinned (hinged, free to rotate), = 1.0.
- For both ends fixed, = 0.50.
- For one end fixed and the other end pinned, ≈ 0.7071.
- For one end fixed and the other end free to move laterally, = 2.0.
- is the effective length of the column.






Examination of this formula reveals the following interesting facts with regard to the load-bearing ability of slender columns.
- Elasticity and not the compressive strength of the materials of the column determines the critical load.
- The critical load is directly proportional to the second moment of area of the cross section.
- The boundary conditions have a considerable effect on the critical load of slender columns. The boundary conditions determine the mode of bending and the distance between inflection points on the deflected column. The inflection points in the deflection shape of the column are the points at which the curvature of the column change sign and are also the points at which the internal bending moments are zero. The closer together the inflection points are, the higher the resulting capacity of the column.
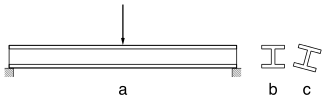
The strength of a column may therefore be increased by distributing the material so as to increase the moment of inertia. This can be done without increasing the weight of the column by distributing the material as far from the principal axis of the cross section as possible, while keeping the material thick enough to prevent local buckling. This bears out the well-known fact that a tubular section is much more efficient than a solid section for column service.
Another bit of information that may be gleaned from this equation is the effect of length on critical load. For a given size column, doubling the unsupported length quarters the allowable load. The restraint offered by the end connections of a column also affects the critical load. If the connections are perfectly rigid, the critical load will be four times that for a similar column where there is no resistance to rotation (in which case the column is idealized as having hinges at the ends).
Since the radius of gyration is defined as the square root of the ratio of the column's moment of inertia about an axis to cross sectional area, the above formula may be rearranged as follows. Using the Euler formula for hinged ends, and substituting A·r2 for I, the following formula results.

where is the allowable stress of the column, and is the slenderness ratio.


Since structural columns are commonly of intermediate length, the Euler formula has little practical application for ordinary design. Issues that cause deviation from the pure Euler column behaviour include imperfections in geometry of the column in combination with plasticity/non-linear stress strain behaviour of the column's material. Consequently, a number of empirical column formulae have been developed that agree with test data, all of which embody the slenderness ratio. Due to the uncertainty in the behavior of columns, for design, appropriate safety factors are introduced into these formulae. One such formula is the Perry Robertson formula which estimates the critical buckling load based on an assumed small initial curvature, hence an eccentricity of the axial load. The Rankine Gordon formula (Named for William John Macquorn Rankine and Perry Hugesworth Gordon (1899 – 1966)) is also based on experimental results and suggests that a column will buckle at a load Fmax given by:

where Fe is the Euler maximum load and Fc is the maximum compressive load. This formula typically produces a conservative estimate of Fmax.
Self-buckling
To get the mathematical demonstration read: Self-buckling
A free-standing, vertical column, with density , Young's modulus , and cross-sectional area , will buckle under its own weight if its height exceeds a certain critical value:[2][3][4]



where g is the acceleration due to gravity, I is the second moment of area of the beam cross section, and B is the first zero of the Bessel function of the first kind of order -1/3, which is equal to 1.86635086...
Buckling under tensile dead loading
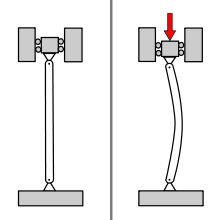
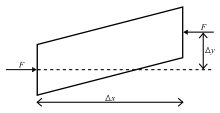
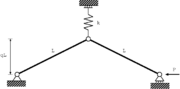
Usually buckling and instability are associated to compression, but recently Zaccaria, Bigoni, Noselli and Misseroni (2011)[5] have shown that buckling and instability can also occur in elastic structures subject to dead tensile load. An example of a single-degree-of-freedom structure is shown in Fig. 2, where the critical load is also indicated. Another example involving flexure of a structure made up of beam elements governed by the equation of the Euler's elastica is shown in Fig.3. In both cases, there are no elements subject to compression. The instability and buckling in tension are related to the presence of the slider, the junction between the two rods, allowing only relative sliding between the connected pieces. Watch a movie for more details.
Constraints, curvature and multiple buckling
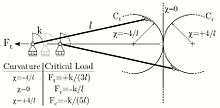
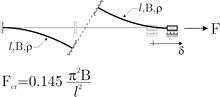
Buckling of an elastic structure strongly depends on the curvature of the constraints against which the ends of the structure are prescribed to move (see Bigoni, Misseroni, Noselli and Zaccaria, 2012[6]). In fact, even a single-degree-of-freedom system (see Fig.3) may exhibit a tensile (or a compressive) buckling load as related to the fact that one end has to move along the circular profile labeled 'Ct' (labelled 'Cc').

The two circular profiles can be arranged in a 'S'-shaped profile, as shown in Fig.4; in that case a discontinuity of the constraint's curvature is introduced, leading to multiple bifurcations. Note that the single-degree-of-freedom structure shown in Fig.4 has two buckling loads (one tensile and one compressive). Watch a movie for more details.
Flutter instability
Structures subject to a follower (nonconservative) load may suffer instabilities which are not of the buckling type and therefore are not detectable with a static approach.[7] For instance, the so-called 'Ziegler column' is shown in Fig.5.
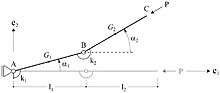
This two-degree-of-freedom system does not display a quasi-static buckling, but becomes dynamically unstable. To see this, we note that the equations of motion are
![\ \left\{{\begin{array}{l}{\frac {1}{3}}\rho l_{1}^{{2}}\left(l_{1}+3l_{2}\right){\ddot {\alpha }}_{1}+{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}\cos(\alpha _{1}-\alpha _{2}){\ddot {\alpha }}_{2}+{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}\sin(\alpha _{1}-\alpha _{2}){\dot {\alpha }}_{2}^{{2}}+(k_{1}+k_{2})\alpha _{1}-k_{2}\alpha _{2}\,+\\[5mm]+(\beta _{1}+\beta _{2}){\dot {\alpha }}_{1}-\beta _{2}{\dot {\alpha }}_{2}-l_{1}P\sin(\alpha _{1}-\alpha _{2})=0,\\[5mm]{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}\cos(\alpha _{1}-\alpha _{2}){\ddot {\alpha }}_{1}+{\frac {1}{3}}\rho l_{2}^{{3}}{\ddot {\alpha }}_{2}-{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}\sin(\alpha _{1}-\alpha _{2}){\dot {\alpha }}_{1}^{{2}}-k_{2}(\alpha _{1}-\alpha _{2})-\beta _{2}({\dot {\alpha }}_{1}-{\dot {\alpha }}_{2})=0,\end{array}}\right.](../I/m/d5ab281cc8f24fcf62a3305ab65dd949ae169c6d.svg)
and their linearized version is
![\ \left\{{\begin{array}{l}{\frac {1}{3}}\rho l_{1}^{{2}}\left(l_{1}+3l_{2}\right){\ddot {\alpha }}_{1}+{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}{\ddot {\alpha }}_{2}+(k_{1}+k_{2})\alpha _{1}-k_{2}\alpha _{2}-l_{1}P(\alpha _{1}-\alpha _{2})=0,\\[5mm]{\frac {1}{2}}\rho l_{1}l_{2}^{{2}}{\ddot {\alpha }}_{1}+{\frac {1}{3}}\rho l_{2}^{{3}}{\ddot {\alpha }}_{2}-k_{2}(\alpha _{1}-\alpha _{2})=0.\end{array}}\right.](../I/m/9ea631c25e3fd1d2d20cf0589e116507e0d41595.svg)
Assuming a time-harmonic solution in the form

we find the critical loads for flutter () and divergence (),



where and .


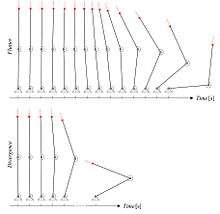
Flutter instability corresponds to a vibrational motion of increasing amplitude and is shown in Fig.6 (upper part) together with the divergence instability (lower part) consisting in an exponential growth.
Recently, Bigoni and Noselli (2011)[8] have experimentally shown that flutter and divergence instabilities can be directly related to dry friction, watch the movie for more details.
Various forms of buckling
Buckling is a state which defines a point where an equilibrium configuration becomes unstable under a parametric change of load and can manifest itself in several different phenomena. All can be classified as forms of bifurcation.
There are four basic forms of bifurcation associated with loss of structural stability or buckling in the case of structures with a single degree of freedom. These comprise two types of pitchfork bifurcation, one saddle-node bifurcation (often referred to as a limit point) and one transcritical bifurcation. The pitchfork bifurcations are the most commonly studied forms and include the buckling of columns, sometimes known as Euler buckling; the buckling of plates, sometimes known as local buckling, which is well known to be relatively safe (both are supercritical phenomena) and the buckling of shells, which is well-known to be a highly dangerous (subcritical phenomenon).[9] Using the concept of potential energy, equilibrium is defined as a stationary point with respect to the degree(s) of freedom of the structure. We can then determine whether the equilibrium is stable, as in the case where the stationary point is a local minimum; or unstable, as in the case where the stationary point is a maximum point of inflection or saddle point (for multiple-degree-of-freedom structures only) – see animations below.
| Archetypal rigid link models with a single degree of freedom (SDOF) used to demonstrate basic buckling phenomena (see bifurcation diagrams below). All cases start at the position corresponding to q=0. | ||||||||
|---|---|---|---|---|---|---|---|---|
|

| Animations of the variation of total potential energy (red) for various load values, P (black), in generic structural systems with the indicated bifurcation or buckling behaviour. | ||||||||
|---|---|---|---|---|---|---|---|---|
|


In Euler buckling,[10][11] when the applied load is increased by a small amount beyond the critical load, the structure deforms into a buckled configuration which is adjacent to the original configuration. For example, the Euler column pictured will start to bow when loaded slightly above its critical load, but will not suddenly collapse.

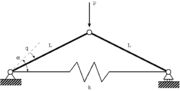
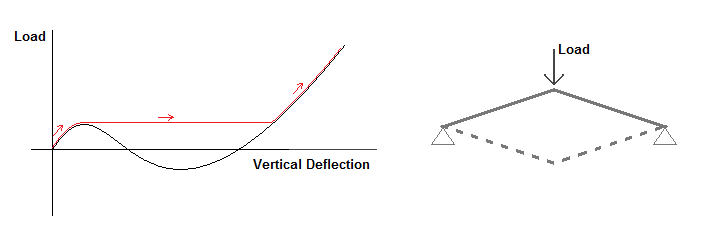
In structures experiencing limit point instability, if the load is increased infinitesimally beyond the critical load, the structure undergoes a large deformation into a different stable configuration which is not adjacent to the original configuration. An example of this type of buckling is a toggle frame (pictured) which 'snaps' into its buckled configuration.
Bicycle wheels
A conventional bicycle wheel consists of a thin rim kept under high compressive stress by the (roughly normal) inward pull of a large number of spokes. It can be considered as a loaded column that has been bent into a circle. If spoke tension is increased beyond a safe level, the wheel spontaneously fails into a characteristic saddle shape (sometimes called a "taco" or a "pringle") like a three-dimensional Euler column. This is normally a purely elastic deformation and the rim will resume its proper plane shape if spoke tension is reduced slightly.
Surface materials

Buckling is also a failure mode in pavement materials, primarily with concrete, since asphalt is more flexible. Radiant heat from the sun is absorbed in the road surface, causing it to expand, forcing adjacent pieces to push against each other. If the stress is great enough, the pavement can lift up and crack without warning. Going over a buckled section can be very jarring to automobile drivers, described as running over a speed hump at highway speeds.
Similarly, rail tracks also expand when heated, and can fail by buckling, a phenomenon called sun kink. It is more common for rails to move laterally, often pulling the underlain railroad ties (sleepers) along.
More on sun kink Cause
The buckling force in the track due to warming up is a function of the rise in temperature only and is independent of the track length:
.
Derivation of buckling force function:
The linear thermal expansion due to heating of the track is found using
where
- ΔL = thermal expansion of the rail
- L = length of the rail/track
- α = coefficient of thermal expansion
- ΔT = increase in temperature
According to Hooke's law the extension due to a force (in the rail) is
where
- ΔL = extension of the rail/track
- F = the force extending a rod, here the induced force in the rail
- E = modulus of elasticity of rail material (steel)
- A = cross section of rail
- L = length of rail
Putting these together gives
or
Accidents
These accidents were deemed to be sun kink related (more information available at List of rail accidents (2000–2009)):
- April 18, 2002 Amtrak Auto-Train derailment, off CSX tracks, near Crescent City, Florida.
- July 29, 2002 Amtrak Capitol Limited derails, off CSX tracks, near Kensington, Maryland.
- July 8, 2010 CSX train derails off tracks in Waxhaw, North Carolina.
- July 6, 2012 WMATA Metrorail train derails off tracks near Hyattsville, Maryland.[12]




Energy method
Often it is very difficult to determine the exact buckling load in complex structures using the Euler formula, due to the difficulty in determining the constant K. Therefore, maximum buckling load often is approximated using energy conservation and is often referred to as the energy method in structural analysis.
The first step in this method is to suggest a displacement function. This function must satisfy the most important boundary conditions, such as displacement and rotation. The more accurate the displacement function, the more accurate the result.
The method assumes that the system (the column) is a conservative system in which energy is not dissipated as heat, hence the energy added to the column by the applied external forces is stored in the column in the form of strain energy.

In this method, there are two equations used (for small deformations) to approximate the "strain" energy (the potential energy stored as elastic deformation of the structure) and "applied" energy (the work done on the system by external forces).


where is the displacement function and the subscripts and refer to the first and second derivatives of the displacement. Energy conservation yields:



Flexural-torsional buckling
Flexural-torsional bucking can be described as a combination of bending and twisting response of a member in compression. Such a deflection mode must be considered for design purposes. This mostly occurs in columns with "open" cross-sections and hence have a low torsional stiffness, such as channels, structural tees, double-angle shapes, and equal-leg single angles. Circular cross sections do not experience such a mode of bucking.
Lateral-torsional buckling
When a simply supported beam is loaded in flexure, the top side is in compression, and the bottom side is in tension. If the beam is not supported in the lateral direction (i.e., perpendicular to the plane of bending), and the flexural load increases to a critical limit, the beam will experience a lateral deflection of the compression flange. The lateral deflection of the compression flange is restrained by the beam web and tension flange, but for an open section the twisting mode is more flexible, hence the beam both twists and deflects laterally in a failure mode known as lateral-torsional buckling. In wide-flange sections (with high lateral bending stiffness), the deflection mode will be mostly twisting in torsion. In narrow-flange sections, the bending stiffness is lower and the column's deflection will be closer to that of lateral bucking deflection mode.
The modification factor (Cb)
Cb is a modification factor used in the equation for nominal flexural strength when determining lateral-torsional buckling. The reason for this factor is to allow for non-uniform moment diagrams when the ends of a beam segment are braced. The conservative value for Cb can be taken as 1, regardless of beam configuration or loading, but in some cases it may be excessively conservative. Cb is always equal to or greater than 1, never less. For cantilevers or overhangs where the free end is unbraced, Cb is equal to 1. Tables of values of Cb for simply supported beams exist.
If an appropriate value of Cb is not given in tables, it can be obtained via the following formula:

where
- = absolute value of maximum moment in the unbraced segment,
- = absolute value of maximum moment at quarter point of the unbraced segment,
- = absolute value of maximum moment at centerline of the unbraced segment,
- = absolute value of maximum moment at three-quarter point of the unbraced segment,




The result is the same for all unit systems.
Plastic buckling
Buckling strength is less than elastic buckling strength of a structure, due to non-linear (plastic) behavior of the material. When the compression load is near the buckling load, the structure will bend significantly and the material of the column will diverge from a linear stress-strain behavior. The stress-strain behavior of materials is not strictly linear even below the yield point, and the modulus of elasticity decreases as stress increases, and significantly so as the stresses approach the yield strength. This lower rigidity reduces the buckling strength of the structure and results in a bucking load less than that predicted by the assumption of lineal elastic behavior.
A more accurate approximation of the buckling load can be had by the use of the tangent modulus of elasticity, Et, in place of the elastic modulus of elasticity. The tangent modulus is a line drawn tangent to the stress-strain curve at a particular value of strain (in the elastic section of the stress-strain curve, the tangent modulus is equal to the elastic modulus). Plots of the tangent modulus of elasticity for a variety of materials are available in standard references.
Dynamic buckling
If a column is loaded suddenly and then the load released, the column can sustain a much higher load than its static (slowly applied) buckling load. This can happen in a long, unsupported column (rod) used as a drop hammer. The duration of compression at the impact end is the time required for a stress wave to travel up the rod to the other (free) end and back down as a relief wave. Maximum buckling occurs near the impact end at a wavelength much shorter than the length of the rod, and at a stress many times the buckling stress of a statically-loaded column. The critical condition for buckling amplitude to remain less than about 25 times the effective rod straightness imperfection at the buckle wavelength is

where is the impact stress, is the length of the rod, is the elastic wave speed, and is the smaller lateral dimension of a rectangular rod. Because the buckle wavelength depends only on and , this same formula holds for thin cylindrical shells of thickness .[13]



Buckling of thin cylindrical shells subject to axial loads
Solutions of Donnell's eight order differential equation gives the various buckling modes of a thin cylinder under compression. But this analysis, which is in accordance with the small deflection theory gives much higher values than shown from experiments. So it is customary to find the critical buckling load for various structures which are cylindrical in shape from pre-existing design curves where critical buckling load Fcr is plotted against the ratio R/t, where R is the radius and t is the thickness of the cylinder for various values of L/R, L the length of the cylinder. If cut-outs are present in the cylinder, critical buckling loads as well as pre-buckling modes will be affected. Presence or absence of reinforcements of cut-outs will also affect the buckling load.
Buckling of pipes and pressure vessels subject to external overpressure
Pipes and pressure vessels subject to external overpressure, caused for example by steam cooling within the pipe and condensing into water with subsequent massive pressure drop, risk buckling due to compressive hoop stresses. Design rules for calculation of the required wall thickness or reinforcement rings are given in various piping and pressure vessel codes.
See also
- Euler's critical load
- Perry Robertson formula
- Rail stressing
- Stiffening
- Wood method
- Yoshimura buckling
References
- ↑ "Column Buckling".
- ↑ Kato, K. (1915). "Mathematical Investigation on the Mechanical Problems of Transmission Line". Journal of the Japan Society of Mechanical Engineers. 19: 41.
- ↑ Ratzersdorfer, Julius (1936). Die Knickfestigkeit von Stäben und Stabwerken [The buckling resistance of members and frames] (in German). Wein, Austria: J. Springer. pp. 107–109. ISBN 978-3-662-24075-5.
- ↑ Cox, Steven J.; C. Maeve McCarthy (1998). "The Shape of the Tallest Column". Society for Industrial and Applied Mathematics. 29: 547–554. doi:10.1137/s0036141097314537.
- ↑ Zaccaria, D.; Bigoni, D.; Noselli, G.; Misseroni, D. (21 April 2011). "Structures buckling under tensile dead load" (PDF). Proceedings of the Royal Society A. 467 (2130): 1686–1700. doi:10.1098/rspa.2010.0505.
- ↑ Bigoni, D.; Misseroni, D.; Noselli, G.; Zaccaria, D. (2012). "Effects of the constraint's curvature on structural instability: tensile buckling and multiple bifurcations". Proceedings of the Royal Society A. doi:10.1098/rspa.2011.0732.
- ↑ Bigoni, D. (2012). Nonlinear Solid Mechanics: Bifurcation Theory and Material Instability. Cambridge University Press. ISBN 9781107025417.
- ↑ Bigoni, D.; Noselli, G. (2011). "Experimental evidence of flutter and divergence instabilities induced by dry friction". Journal of the Mechanics and Physics of Solids. 59: 2208–2226. Bibcode:2011JMPSo..59.2208B. doi:10.1016/j.jmps.2011.05.007.
- ↑ Thompson, J. M. T.; Hunt, G. W. (1973). A general theory of elastic stability. Wiley. ISBN 978-0471859918.
- ↑ Jones, Robert M. (1 December 2007). Buckling of Bars, Plates, and Shells. CRC. ISBN 978-1560328278.
- ↑ Earls, Christopher J. (2007). Observations on eigenvalue buckling analysis within a finite element context. Proceedings of the Structural Stability Research Council, Annual Stability Conference. New Orleans, LA.
- ↑ http://dcist.com/2012/07/excessive_heat_probable_cause_in_gr.php
- ↑ Lindberg, H. E.; Florence, A. L. (1987). Dynamic Pulse Buckling. Martinus Nijhoff Publishers. pp. 11–56, 297–298.
Further reading
- Timoshenko, S. P., and Gere, J. M., Theory of Elastic Stability, 2 ed., McGraw-Hill, 1961.
- Nenezich, M., Thermoplastic Continuum Mechanics, Journal of Aerospace Structures, Vol. 4, 2004.
- The Stability of Elastic Equilibrium by W. T. Koiter, PhD Thesis, 1945.
- Dhakal Rajesh and Koichi Maekawa (October 2002). "Reinforcement Stability and Fracture of Cover Concrete in Reinforced Concrete Members”.
- Willian T. Segui (2007). “Steel Design” Fourth Edition. United States. Chris Carson.
- Analysis and design of flight vehicle structures- E.F.Bruhn
External links
- The complete theory and example experimental results for long columns are available as a 39-page PDF document at http://lindberglce.com/tech/buklbook.htm
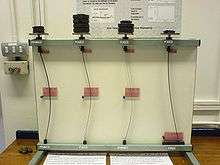
- Laboratory for Physical Modeling of Structures and Photoelasticity (University of Trento, Italy)
- https://web.archive.org/web/20100401042249/http://www.midasuser.com.tw:80/t_support/tech_pds/files/Tech%20Note-Lateral%20Torsional%20Buckling.pdf