Exterior derivative
| Part of a series of articles about | ||||||
| Calculus | ||||||
|---|---|---|---|---|---|---|
|
||||||
|
Specialized |
||||||
On a differentiable manifold, the exterior derivative extends the concept of the differential of a function to differential forms of higher degree. The exterior derivative was first described in its current form by Élie Cartan in 1899; it allows for a natural, metric-independent generalization of Stokes' theorem, Gauss's theorem, and Green's theorem from vector calculus.
If a k-form is thought of as measuring the flux through an infinitesimal k-parallelotope, then its exterior derivative can be thought of as measuring the net flux through the boundary of a (k + 1)-parallelotope.
Definition
The exterior derivative of a differential form of degree k is a differential form of degree k + 1.
If f is a smooth function (a 0-form), then the exterior derivative of f is the differential of f . That is, df is the unique 1-form such that for every smooth vector field X, df (X) = dX f , where dX f is the directional derivative of f in the direction of X.
There are a variety of equivalent definitions of the exterior derivative of a general k-form.
In terms of axioms
The exterior derivative is defined to be the unique ℝ-linear mapping from k-forms to (k + 1)-forms satisfying the following properties:
- df is the differential of f for smooth functions f .
- d(df ) = 0 for any smooth function f .
- d(α ∧ β) = dα ∧ β + (−1)p (α ∧ dβ) where α is a p-form. That is to say, d is an antiderivation of degree 1 on the exterior algebra of differential forms.
The second defining property holds in more generality: in fact, d(dα) = 0 for any k-form α; more succinctly, d2 = 0. The third defining property implies as a special case that if f is a function and α a k-form, then d( fα) = d( f ∧ α) = df ∧ α + f ∧ dα because functions are 0-forms, and scalar multiplication and the exterior product are equivalent when one of the arguments is a scalar.
In terms of local coordinates
Alternatively, one can work entirely in a local coordinate system (x1, ..., xn). The coordinate differentials dx1, ..., dxn form a basis of the space of one-forms, each associated with a coordinate. Given a multi-index I = (i1, ..., ik) with 1 ≤ ip ≤ n for 1 ≤ p ≤ k (and denoting dxi1 ∧ ... ∧ dxik with an abuse of notation dxI), the exterior derivative of a (simple) k-form

over ℝn is defined as

The definition of the exterior derivative is extended linearly to a general k-form

where each of the components of the multi-index I run over all the values in {1, ..., n}. Note that whenever i equals one of the components of the multi-index I then dxi ∧ dxI = 0 (see Wedge product).
The definition of the exterior derivative in local coordinates follows from the preceding definition in terms of axioms. Indeed, with the k-form φ as defined above,

Here, we have interpreted g as a 0-form, and then applied the properties of the exterior derivative.
This result extends directly to the general k-form ω as

In particular, for a 1-form ω, the components of dω in local coordinates are

In terms of invariant formula
Alternatively, an explicit formula can be given for the exterior derivative of a k-form ω, when paired with k + 1 arbitrary smooth vector fields V0,V1, ..., Vk:
![{\displaystyle d\omega (V_{0},...,V_{k})=\sum _{i}(-1)^{i}V_{i}\left(\omega \left(V_{0},\ldots ,{\hat {V}}_{i},\ldots ,V_{k}\right)\right)+\sum _{i<j}(-1)^{i+j}\omega \left(\left[V_{i},V_{j}\right],V_{0},\ldots ,{\hat {V}}_{i},\ldots ,{\hat {V}}_{j},\ldots ,V_{k}\right)}](../I/m/4c99eec338870915298c1696a1c1ea496396b848.svg)
where [Vi, Vj] denotes the Lie bracket and a hat denotes the omission of that element:

In particular, for 1-forms we have: dω(X, Y) = X(ω(Y)) − Y(ω(X)) − ω([X, Y]), where X and Y are vector fields, X(ω(Y)) is the scalar field defined by the vector field X ∈ Γ(TM) applied as a differential operator ("directional derivative along X") to the scalar field defined by applying ω ∈ Γ∗(TM) as a covector field to the vector field Y ∈ Γ(TM) and likewise for Y(ω(X)).
Note: Some authors (e.g., Kobayashi–Nomizu and Helgason) use a formula that differs by a factor of 1/k + 1:
![{\displaystyle {\begin{aligned}d\omega (V_{0},...,V_{k})&={1 \over k+1}\sum _{i}(-1)^{i}V_{i}\left(\omega \left(V_{0},\ldots ,{\hat {V}}_{i},\ldots ,V_{k}\right)\right)\\&+{1 \over k+1}\sum _{i<j}(-1)^{i+j}\omega \left(\left[V_{i},V_{j}\right],V_{0},\ldots ,{\hat {V}}_{i},\ldots ,{\hat {V}}_{j},\ldots ,V_{k}\right).\end{aligned}}}](../I/m/c528f4f794383141b4b1a77c08be9806347ecc96.svg)
Stokes' theorem on manifolds
If M is a compact smooth orientable n-dimensional manifold with boundary, and ω is an (n − 1)-form on M, then the generalized form of Stokes' theorem states that:

Intuitively, if one thinks of M as being divided into infinitesimal regions, and one adds the flux through the boundaries of all the regions, the interior boundaries all cancel out, leaving the total flux through the boundary of M.
Examples
Example 1. Consider σ = u dx1 ∧ dx2 over a 1-form basis dx1, ..., dxn. The exterior derivative is:

The last formula follows easily from the properties of the wedge product. Namely, dxi ∧ dxi = 0.
Example 2. Let σ = u dx + v dy be a 1-form defined over ℝ2. By applying the above formula to each term (consider x1 = x and x2 = y) we have the following sum,

Further properties
Closed and exact forms
A k-form ω is called closed if dω = 0; closed forms are the kernel of d. ω is called exact if ω = dα for some (k − 1)-form α; exact forms are the image of d. Because d2 = 0, every exact form is closed. The Poincaré lemma states that in a contractible region, the converse is true.
de Rham cohomology
Because the exterior derivative d has the property that d2 = 0, it can be used as the differential (coboundary) to define de Rham cohomology on a manifold. The k-th de Rham cohomology (group) is the vector space of closed k-forms modulo the exact k-forms; as noted in the previous section, the Poincaré lemma states that these vector spaces are trivial for a contractible region, for k > 0. For smooth manifolds, integration of forms gives a natural homomorphism from the de Rham cohomology to the singular cohomology over ℝ. The theorem of de Rham shows that this map is actually an isomorphism, a far-reaching generalization of the Poincaré lemma. As suggested by the generalized Stokes' theorem, the exterior derivative is the "dual" of the boundary map on singular simplices.
Naturality
The exterior derivative is natural in the technical sense: if f : M → N is a smooth map and Ωk is the contravariant smooth functor that assigns to each manifold the space of k-forms on the manifold, then the following diagram commutes
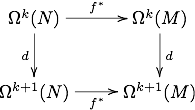
so d( f ∗ω) = f ∗dω, where f ∗ denotes the pullback of f . This follows from that f ∗ω(·), by definition, is ω( f∗(·)), f∗ being the pushforward of f . Thus d is a natural transformation from Ωk to Ωk+1.
Exterior derivative in vector calculus
Most vector calculus operators are special cases of, or have close relationships to, the notion of exterior differentiation.
Gradient
A smooth function f : ℝn → ℝ is a 0-form. The exterior derivative of this 0-form is the 1-form

That is, the form df acts on any vector field V by outputting, at each point, the scalar product of V with the gradient ∇f of f .
The 1-form df is a section of the cotangent bundle, that gives a local linear approximation to f in the cotangent space at each point.
Divergence
A vector field V = (v1, v2, ... vn) on ℝn has a corresponding (n − 1)-form

where denotes the omission of that element.

(For instance, when n = 3, i.e. in three-dimensional space, the 2-form ωV is locally the scalar triple product with V.) The integral of ωV over a hypersurface is the flux of V over that hypersurface.
The exterior derivative of this (n − 1)-form is the n-form

Curl
A vector field V on ℝn also has a corresponding 1-form
- ,

Locally, ηV is the dot product with V. The integral of ηV along a path is the work done against −V along that path.
When n = 3, in three-dimensional space, the exterior derivative of the 1-form ηV is the 2-form

Invariant formulations of grad, curl, div, and Laplacian
On any pseudo-Riemannian manifold, the standard vector calculus operators can be generalized[1] and written in coordinate-free notation as follows:

where ⋆ is the Hodge star operator, ♭ and ♯ are the musical isomorphisms, f is a scalar field and F is a vector field.
See also
- Exterior covariant derivative
- de Rham complex
- Discrete exterior calculus
- Green's theorem
- Lie derivative
- Stokes' theorem
- Fractal derivative
Notes
- ↑ This is a natural generalization of the operators from three-dimensional Euclidean space to a pseudo-Riemannian manifold of arbitrary dimension . Note that the expression for makes sense only in three dimensions since is a form of degree .




References
- Cartan, Élie (1899). "Sur certaines expressions différentielles et le problème de Pfaff". Annales scientifiques de l'École Normale Supérieure, 3e Série (in French). Paris: Gauthier-Villars. 16: 239–332. ISSN 0012-9593. Zbl 30.0313.04. Retrieved 2 Feb 2016.
- Conlon, Lawrence (2001). Differentiable manifolds. Basel, Switzerland: Birkhäuser. p. 239. ISBN 0-8176-4134-3.
- Darling, R. W. R. (1994). Differential forms and connections. Cambridge, UK: Cambridge University Press. p. 35. ISBN 0-521-46800-0.
- Flanders, Harley (1989). Differential forms with applications to the physical sciences. New York: Dover Publications. p. 20. ISBN 0-486-66169-5.
- Ramanan, S. (2005). Global calculus. Providence, Rhode Island: American Mathematical Society. p. 54. ISBN 0-8218-3702-8.
- Spivak, Michael (1971). Calculus on Manifolds. Boulder, Colorado: Westview Press. ISBN 9780805390216.
- Warner, Frank W. (1983), Foundations of differentiable manifolds and Lie groups, Graduate Texts in Mathematics, 94, Springer, ISBN 0-387-90894-3