Polyhedron
 Regular tetrahedron |
 Small stellated dodecahedron |
 Icosidodecahedron |
 Great cubicuboctahedron |
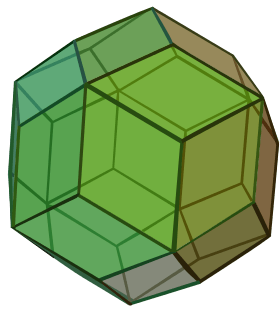 Rhombic triacontahedron |
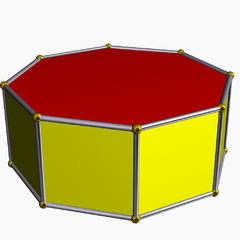 Octagonal prism |
In elementary geometry, a polyhedron (plural polyhedra or polyhedrons) is a solid in three dimensions with flat polygonal faces, straight edges and sharp corners or vertices. The word polyhedron comes from the Classical Greek πολύεδρον, as poly- (stem of πολύς, "many") + -hedron (form of ἕδρα, "base" or "seat").
Cubes and pyramids are examples of polyhedra.
A polyhedron is said to be convex if its surface (comprising its faces, edges and vertices) does not intersect itself and the line segment joining any two points of the polyhedron is contained in the interior or surface.
A polyhedron is a 3-dimensional example of the more general polytope in any number of dimensions.
Basis for definition
In elementary geometry, the faces are polygons – regions of planes – meeting in pairs along their edges which are straight-line segments, and with the edges meeting in vertex points. Treating a polyhedron as a solid bounded by flat faces and straight edges is not very precise; for example it is difficult to reconcile with star polyhedra. Grünbaum (1994, p. 43) observed, "The Original Sin in the theory of polyhedra goes back to Euclid, and through Kepler, Poinsot, Cauchy and many others ... [in that] at each stage ... the writers failed to define what are the 'polyhedra' ...." Many definitions of "polyhedron" have been given within particular contexts, some more rigorous than others.[1] For example, definitions based on the idea of a bounding surface rather than a solid are common.[2] However such definitions are not always compatible in other mathematical contexts.
One modern approach treats a geometric polyhedron as an injection into real space, a realisation, of some abstract polyhedron.[3] Any such polyhedron can be built up from different kinds of element or entity, each associated with a different number of dimensions:
- 3 dimensions: The interior is the volume bounded by the faces. It might or might not be realised as a solid body.
- 2 dimensions: A face is a polygon bounded by a circuit of edges, and usually also realises the flat (plane) region inside the boundary. These polygonal faces together make up the polyhedral surface.
- 1 dimension: An edge joins one vertex to another and one face to another, and is usually a line segment. The edges together make up the polyhedral skeleton.
- 0 dimensions: A vertex (plural vertices) is a corner point.
Different approaches - and definitions - may require different realisations. Sometimes the interior volume is considered to be part of the polyhedron, sometimes only the surface is considered, and occasionally only the skeleton of edges or even just the set of vertices.[1]
In such elementary geometric and set-based definitions, a polyhedron is typically understood as a three-dimensional example of the more general polytope in any number of dimensions. For example, a polygon has a two-dimensional body and no faces, while a 4-polytope has a four-dimensional body and an additional set of three-dimensional "cells".
In other mathematical disciplines, the term "polyhedron" may be used to refer to a variety of specialised constructs, some geometric and others purely algebraic or abstract. In such contexts definition of the term "polyhedron" may not be consistent with a polytope but rather in contrast to it.[4]
Characteristics
Polyhedral surface
A defining characteristic of almost all kinds of polyhedra is that just two faces join along any common edge. Likewise any edge meets just two vertices, one at each end. These two characteristics are dual to each other and they ensure that the polyhedral surface is continuously connected and does not end abruptly or split off in different directions.
For similar reasons, the surface may not be divisible into two parts such that each part is a valid polyhedron. This rules out both self-intersecting compound polyhedra or figures joined only by a vertex or an edge, such as two tetrahedra joined at a common apex.
Every simple (non-self-intersecting) polyhedron has at least two faces with the same number of edges.[5]
Number of faces
Polyhedra may be classified and are often named according to the number of faces. The naming system is based on Classical Greek, for example tetrahedron (4), pentahedron (5), hexahedron (6), triacontahedron (30), and so on.
For a complete list of the Greek numeral prefixes see Numeral prefixes>Table of number prefixes in English>Greek>Quantitative
Topological characteristics
The topological class of a polyhedron is defined by its Euler characteristic and orientability.
From this perspective, any polyhedral surface may be classed as certain kind of topological manifold. For example, the surface of a convex or indeed any simply connected polyhedron is a topological sphere.
Euler characteristic
The Euler characteristic χ relates the number of vertices V, edges E, and faces F of a polyhedron:

This is equal to the topological Euler characteristic of its surface. For a convex polyhedron or more generally any simply connected polyhedron (i.e. with surface a topological sphere), χ = 2.[6]
For more complicated shapes, the Euler characteristic relates to the number of toroidal holes, handles and/or cross-caps in the surface and will be less than 2.[6]
Leonhard Euler's discovery of the characteristic which bears his name marked the beginning of the modern discipline of topology.[6]
Orientability
Some polyhedra have two distinct sides to their surface, for example the inside and outside of a convex polyhedron paper model can each be given a different colour (although the inside colour will be hidden from view). We say that the figure is orientable. Some non-convex orientable polyhedra have regions turned "inside out" so that both colours appear on the outside in different places.
But for some polyhedra, such as the tetrahemihexahedron, this is not possible and the surface is said to be one-sided. Such a polyhedron is non-orientable.
All polyhedra with odd-numbered Euler characteristic χ are non-orientable. A given figure with even χ < 2 may or may not be orientable. For example, the one-holed toroid and the Klein bottle both have χ = 0, with the first being orientable and the other not.
Duality
For every polyhedron there exists a dual polyhedron having:
- faces in place of the original's vertices and vice versa,
- the same number of edges
- the same Euler characteristic and orientability
The dual of a convex polyhedron and of many other polyhedra can be obtained by the process of polar reciprocation.
Dual polyhedra exist in pairs. The dual of a dual is just the original polyhedron again. Some polyhedra are self-dual, meaning that the dual of the polyhedron is congruent to the original polyhedron.
Vertex figures
For every vertex one can define a vertex figure, which describes the local structure of the polyhedron around the vertex. Precise definitions vary, but a vertex figure can be thought of as the polygon exposed where a slice through the polyhedron cuts off a corner.[2] If the vertex figure is a regular polygon, then the vertex itself is said to be regular.
Volume
- Regular polyhedra
Any regular polyhedron can be divided up into congruent pyramids, with each pyramid having a face of the polyhedron as its base and the centre of the polyhedron as its apex. The height of a pyramid is equal to the inradius of the polyhedron. If the area of a face is and the in-radius is then the volume of the pyramid is one-third of the base times the height, or . For a regular polyhedron with faces, its volume is then simply




- .

For instance, a cube with edges of length has six faces, each face being a square with area . The inradius from the center of the face to the center of the cube is . Then the volume is given by




the usual formula for the volume of a cube.
- Orientable polyhedra
The volume of any orientable polyhedron can be calculated using the divergence theorem. Consider the vector field , whose divergence is identically 1. The divergence theorem implies that the volume is equal to a surface integral of :



When Ω is the region enclosed by a polyhedron, since the faces of a polyhedron are planar and have piecewise constant normal vectors, this simplifies to

where is the ith face's barycenter, is its normal vector, and is its area.[7] Once the faces are decomposed in a set of non-overlapping triangles with surface normals pointing away from the volume, the volume is one sixth of the sum over the triple products of the nine Cartesian vertex coordinates of the triangles.



Since it may be difficult to enumerate the faces, volume computation may be challenging, and hence there exist specialized algorithms to determine the volume (many of these generalize to convex polytopes in higher dimensions).[8]
Convex polyhedra

A polyhedron is said to be convex if its surface (comprising its faces, edges and vertices) does not intersect itself and the line segment joining any two points of the polyhedron is contained in the interior or surface. A convex polyhedron is sometimes defined as a convex set of points in space, the intersection of a set of half-spaces, or the convex hull of a set of points.[4] However many such definitions cannot easily be extended to include self-intersecting figures such as star polyhedra.[1]
Important classes of convex polyhedra include the highly symmetrical Platonic solids, Archimedean solids and Archimedean duals or Catalan solids, and the regular-faced deltahedra and Johnson solids.
Convex polyhedra, and especially triangular pyramids or 3-simplexes, are important in many areas of mathematics, especially those relating to topology.[4][6]
Symmetries
Many of the most studied polyhedra are highly symmetrical.
A symmetrical polyhedron can be rotated and superimposed on its original position such that its faces and so on have changed position. All the elements which can be superimposed on each other in this way are said to lie in a given "symmetry orbit". For example, all the faces of a cube lie in one orbit, while all the edges lie in another. If all the elements of a given dimension, say all the faces, lie in the same orbit, the figure is said to be "transitive" on that orbit. For example, a cube has one kind of face so it is face-transitive, while a truncated cube has two kinds of face and is not.
Such polyhedra can be distorted so that they are no longer symmetrical. But where a polyhedral name is given, such as icosidodecahedron, the most symmetrical geometry is almost always implied, unless otherwise stated.
There are several types of highly symmetric polyhedron, classified by which kind of element - faces, edges and/or vertices - belong to a single symmetry orbit:
- Regular if it is vertex-transitive, edge-transitive and face-transitive (this implies that every face is the same regular polygon; it also implies that every vertex is regular).
- Quasi-regular if it is vertex-transitive and edge-transitive (and hence has regular faces) but not face-transitive. A quasi-regular dual is face-transitive and edge-transitive (and hence every vertex is regular) but not vertex-transitive.
- Semi-regular if it is vertex-transitive but not edge-transitive, and every face is a regular polygon. (This is one of several definitions of the term, depending on author. Some definitions overlap with the quasi-regular class). These polyhedra include the semiregular prisms and antiprisms. A semi-regular dual is face-transitive but not vertex-transitive, and every vertex is regular.
- Uniform if it is vertex-transitive and every face is a regular polygon, i.e. it is regular, quasi-regular or semi-regular. A uniform dual is face-transitive and has regular vertices, but is not necessarily vertex-transitive).
- Isogonal or vertex-transitive if all vertices are the same, in the sense that for any two vertices there exists a symmetry of the polyhedron mapping the first isometrically onto the second.
- Isotoxal or edge-transitive if all edges are the same, in the sense that for any two edges there exists a symmetry of the polyhedron mapping the first isometrically onto the second.
- Isohedral or face-transitive if all faces are the same, in the sense that for any two faces there exists a symmetry of the polyhedron mapping the first isometrically onto the second.
- Noble if it is face-transitive and vertex-transitive (but not necessarily edge-transitive). The regular polyhedra are also noble; they are the only noble uniform polyhedra.
A polyhedron can belong to the same overall symmetry group as one of higher symmetry, but will be of lower symmetry if it has several groups of elements in different symmetry orbits. For example, the truncated cube has its triangles and octagons in different orbits.
Some classes of polyhedron have only a single main axis of symmetry. These include the pyramids as well as the semiregular prisms and antiprisms.
Regular polyhedra
Regular polyhedra are the most highly symmetrical. Altogether there are nine regular polyhedra.
The five convex examples have been known since antiquity and are called the Platonic solids. These are the triangular pyramid or tetrahedron, cube (regular hexahedron), octahedron, dodecahedron and icosahedron:
 |
 |
 |
There are also four regular star polyhedra, known as the Kepler-Poinsot polyhedra after their discoverers.
The dual of a regular polyhedron is also regular.
Uniform polyhedra and their duals
Uniform polyhedra are vertex-transitive and every face is a regular polygon. They may be subdivided into the regular, quasi-regular, or semi-regular, and may be convex or starry.
The uniform duals have irregular faces but are face-transitive and every vertex figure is a regular polygon. A uniform polyhedron has the same symmetry orbits as its dual, with the faces and vertices simply swapped over. The duals of the convex Archimedean polyhedra are sometimes called the Catalan solids.
The uniform polyhedra and their duals are traditionally classified according to their degree of symmetry, and whether they are convex or not.
| Convex uniform | Convex uniform dual | Star uniform | Star uniform dual | |
|---|---|---|---|---|
| Regular | Platonic solids | Kepler–Poinsot polyhedra | ||
| Quasiregular | Archimedean solids | Catalan solids | (no special name) | (no special name) |
| Semiregular | (no special name) | (no special name) | ||
| Prisms | Bipyramids | Star prisms | Star Bipyramids | |
| Antiprisms | Trapezohedra | Star antiprisms | Star trapezohedra | |
Pyramids
Symmetrical pyramids include some of the most time-honoured and famous of all polyhedra, such as the four-sided Egyptian pyramids.
Noble polyhedra
A noble polyhedron is both isohedral (equal-faced) and isogonal (equal-cornered), but not necessarily equal-sided. Besides the regular polyhedra, there are many other examples.
The dual of a noble polyhedron is also noble.
Isohedra
An isohedron is a polyhedron with symmetries acting transitively on its faces. Their topology can be represented by a face configuration. All 5 Platonic solids and 13 Catalan solids are isohedra, as well as the infinite families of trapezohedra and bipyramids. Some isohedra allow geometric variations including concave and self-intersecting forms.
Symmetry groups
Many of the symmetries or Point groups in three dimensions are named after polyhedra having the associated symmetry. These include:
- T - chiral tetrahedral symmetry; the rotation group for a regular tetrahedron; order 12.
- Td - full tetrahedral symmetry; the symmetry group for a regular tetrahedron; order 24.
- Th - pyritohedral symmetry; the symmetry of a pyritohedron; order 24.
- O - chiral octahedral symmetry;the rotation group of the cube and octahedron; order 24.
- Oh - full octahedral symmetry; the symmetry group of the cube and octahedron; order 48.
- I - chiral icosahedral symmetry; the rotation group of the icosahedron and the dodecahedron; order 60.
- Ih - full icosahedral symmetry; the symmetry group of the icosahedron and the dodecahedron; order 120.
- Cnv - n-fold pyramidal symmetry
- Dnh - n-fold prismatic symmetry
- Dnv - n-fold antiprismatic symmetry.
Those with chiral symmetry do not have reflection symmetry and hence have two enantiomorphous forms which are reflections of each other. Examples include the snub cuboctahedron and snub icosidodecahedron.
Polyhedra with regular faces
Besides the regular and uniform polyhedra, there are some other classes which have regular faces but lower overall symmetry.
Equal regular faces
Convex polyhedra where every face is the same kind of regular polygon may be found among three families:
- Triangles: These polyhedra are called deltahedra. There are eight convex deltahedra, comprising three of the regular (Platonic) polyhedra and five non-uniform examples.
- Squares: The cube is the only convex example. Others can be obtained by joining cubes together, although care must be taken if coplanar faces are to be avoided.
- Pentagons: The regular dodecahedron is the only convex example.
Polyhedra with congruent regular faces of six or more sides are all non-convex, because the vertex of three regular hexagons defines a plane.
The total number of convex polyhedra with equal regular faces is thus ten, comprising the five Platonic solids and the five non-uniform deltahedra.[9]
There are infinitely many non-convex examples. Infinite sponge-like examples called infinite skew polyhedra exist in some of these families.
Johnson solids
Norman Johnson sought which convex non-uniform polyhedra had regular faces, although not necessarily all alike. In 1966, he published a list of 92 such solids, gave them names and numbers, and conjectured that there were no others. Victor Zalgaller proved in 1969 that the list of these Johnson solids was complete.
Other important families of polyhedra
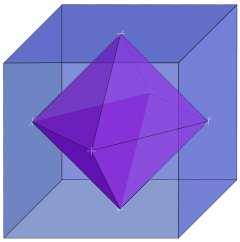
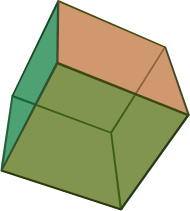
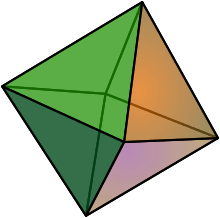
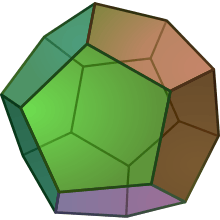
Stellations and facettings
 |
 |
 |
 |
 |
Stellation of a polyhedron is the process of extending the faces (within their planes) so that they meet to form a new polyhedron.
It is the exact reciprocal to the process of facetting which is the process of removing parts of a polyhedron without creating any new vertices.
Zonohedra
A zonohedron is a convex polyhedron where every face is a polygon with inversion symmetry or, equivalently, symmetry under rotations through 180°.
Toroidal polyhedra
A toroidal polyhedron is a polyhedron with an Euler characteristic of 0 or smaller, equivalent to a genus of 1 or greater, representing a torus surface having one or more holes through the middle.
Spacefilling polyhedra
A spacefilling polyhedron packs with copies of itself to fill space. Such a close-packing or spacefilling is often called a tessellation of space or a honeycomb. Some honeycombs involve more than one kind of polyhedron.
Compounds
A polyhedral compound is made of two or more polyhedra sharing a common centre.
Symmetrical compounds often share the same vertices as other well-known polyhedra and may often also be formed by stellation. Some are listed in the list of Wenninger polyhedron models.
Orthogonal polyhedra
An orthogonal polyhedron is one all of whose faces meet at right angles, and all of whose edges are parallel to axes of a Cartesian coordinate system. Aside from a rectangular box, orthogonal polyhedra are nonconvex. They are the 3D analogs of 2D orthogonal polygons, also known as rectilinear polygons. Orthogonal polyhedra are used in computational geometry, where their constrained structure has enabled advances on problems unsolved for arbitrary polyhedra, for example, unfolding the surface of a polyhedron to a polygonal net.[10]
Generalisations of polyhedra
The name 'polyhedron' has come to be used for a variety of objects having similar structural properties to traditional polyhedra.
Apeirohedra
A classical polyhedral surface has a finite number of faces, joined in pairs along edges. If the number of faces extends indefinitely it is called an apeirohedron. Examples include:
- Tilings or tessellations of the plane.
- Sponge-like structures called infinite skew polyhedra.
Complex polyhedra
A complex polyhedron is one which is constructed in complex Hilbert 3-space. This space has six dimensions: three real ones corresponding to ordinary space, with each accompanied by an imaginary dimension. A complex polyhedron is mathematically more closely related to configurations than to real polyhedra.[11]
Curved polyhedra
Some fields of study allow polyhedra to have curved faces and edges.
Spherical polyhedra
The surface of a sphere may be divided by line segments into bounded regions, to form a spherical polyhedron. Much of the theory of symmetrical polyhedra is most conveniently derived in this way.
The first known man-made polyhedra are spherical polyhedra carved in stone, Poinsot used spherical polyhedra to discover the four regular star polyhedra and Coxeter used them to enumerate all but one of the uniform polyhedra.
Some polyhedra, such as hosohedra and dihedra, exist only as spherical polyhedra and have no flat-faced analogue.
Curved spacefilling polyhedra
If faces are allowed to be concave as well as convex, adjacent faces may be made to meet together with no gap. Some of these curved polyhedra can pack together to fill space. Two important types are:
- Bubbles in froths and foams, such as Weaire-Phelan bubbles.
- Spacefilling forms used in architecture.[12]
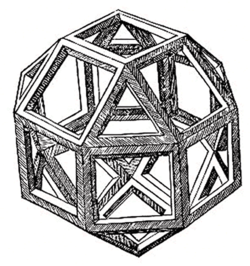
Hollow-faced or skeletal polyhedra
It is not necessary to fill in the face of a figure before we can call it a polyhedron. For example, Leonardo da Vinci devised frame models of the regular solids, which he drew for Pacioli's book Divina Proportione. In modern times, Branko Grünbaum (1994) made a special study of this class of polyhedra, in which he developed an early idea of abstract polyhedra. He defined a face as a cyclically ordered set of vertices, and allowed faces to be skew as well as planar.[13]
Alternative usages
From the latter half of the twentieth century, various mathematical constructs have been found to have properties also present in traditional polyhedra. Rather than confining the term "polyhedron" to describe a three-dimensional polytope, it has been adopted to describe various related but distinct kinds of structure.[4]
General polyhedra
A polyhedron has been defined as a set of points in real affine (or Euclidean) space of any dimension n that has flat sides. It may alternatively be defined as the union of a finite number of convex polyhedra, where a convex polyhedron is any point set that is the intersection of a finite number of half-spaces. Unlike an elementary polyhedron, it may be bounded or unbounded. In this meaning, a polytope is a bounded polyhedron.
Analytically, such a convex polyhedron is expressed as the solution set for a system of linear inequalities. Defining polyhedra in this way provides a geometric perspective for problems in linear programming.
Many traditional polyhedral forms are general polyhedra. Other examples include:
- A quadrant in the plane. For instance, the region of the cartesian plane consisting of all points above the horizontal axis and to the right of the vertical axis: { ( x, y ) : x ≥ 0, y ≥ 0 }. Its sides are the two positive axes, and it is otherwise unbounded.
- An octant in Euclidean 3-space, { ( x, y, z ) : x ≥ 0, y ≥ 0, z ≥ 0 }.
- A prism of infinite extent. For instance a doubly infinite square prism in 3-space, consisting of a square in the xy-plane swept along the z-axis: { ( x, y, z ) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1 }.
- Each cell in a Voronoi tessellation is a convex polyhedron. In the Voronoi tessellation of a set S, the cell A corresponding to a point c∈S is bounded (hence a traditional polyhedron) when c lies in the interior of the convex hull of S, and otherwise (when c lies on the boundary of the convex hull of S) A is unbounded.
Topological polyhedra
A topological polytope is a topological space given along with a specific decomposition into shapes that are topologically equivalent to convex polytopes and that are attached to each other in a regular way.
Such a figure is called simplicial if each of its regions is a simplex, i.e. in an n-dimensional space each region has n+1 vertices. The dual of a simplicial polytope is called simple. Similarly, a widely studied class of polytopes (polyhedra) is that of cubical polyhedra, when the basic building block is an n-dimensional cube.
Abstract polyhedra
An abstract polytope is a partially ordered set (poset) of elements whose partial ordering obeys certain rules of incidence (connectivity) and ranking. The elements of the set correspond to the vertices, edges, faces and so on of the polytope: vertices have rank 0, edges rank 1, etc. with the partially ordered ranking corresponding to the dimensionality of the geometric elements. The empty set, required by set theory, has a rank of −1 and is sometimes said to correspond to the null polytope. An abstract polyhedron is an abstract polytope having the following ranking:
- rank 3: The maximal element, sometimes identified with the body.
- rank 2: The polygonal faces.
- rank 1: The edges.
- rank 0: the vertices.
- rank −1: The empty set, sometimes identified with the null polytope.
Any geometric polyhedron is then said to be a "realization" in real space of the abstract poset.
Polyhedra as graphs
Any polyhedron gives rise to a graph, or skeleton, with corresponding vertices and edges. Thus graph terminology and properties can be applied to polyhedra. For example:
- Due to Steinitz theorem convex polyhedra are in one-to-one correspondence with 3-connected planar graphs.
- The tetrahedron gives rise to a complete graph (K4). It is the only polyhedron to do so.
- The octahedron gives rise to a strongly regular graph, because adjacent vertices always have two common neighbors, and non-adjacent vertices have four.
- The Archimedean solids give rise to regular graphs: 7 of the Archimedean solids are of degree 3, 4 of degree 4, and the remaining 2 are chiral pairs of degree 5.
History
Prehistory
Polyhedra appeared in early architectural forms such as cubes and cuboids, with the earliest four-sided pyramids of ancient Egypt also dating from the Stone Age.
The Etruscans preceded the Greeks in their awareness of at least some of the regular polyhedra, as evidenced by the discovery near Padua (in Northern Italy) in the late 19th century of a dodecahedron made of soapstone, and dating back more than 2,500 years (Lindemann, 1987).
Greek civilisation
The earliest known written records of these shapes come from Classical Greek authors, who also gave the first known mathematical description of them. The earlier Greeks were interested primarily in the convex regular polyhedra, which came to be known as the Platonic solids. Pythagoras knew at least three of them, and Theaetetus (circa 417 B. C.) described all five. Eventually, Euclid described their construction in his Elements. Later, Archimedes expanded his study to the convex uniform polyhedra which now bear his name. His original work is lost and his solids come down to us through Pappus.
China
Cubical gaming dice in China have been dated back as early as 600 B.C.
By 236 AD, Liu Hui was describing the dissection of the cube into its characteristic tetrahedron (orthoscheme) and related solids, using assemblages of these solids as the basis for calculating volumes of earth to be moved during engineering excavations.
Islamic civilisation
After the end of the Classical era, scholars in the Islamic civilisation continued to take the Greek knowledge forward (see Mathematics in medieval Islam).
The 9th century scholar Thabit ibn Qurra gave formulae for calculating the volumes of polyhedra such as truncated pyramids.
Then in the 10th century Abu'l Wafa described the convex regular and quasiregular spherical polyhedra.
Renaissance
As with other areas of Greek thought maintained and enhanced by Islamic scholars, Western interest in polyhedra revived during the Italian Renaissance. Artists constructed skeletal polyhedra, depicting them from life as a part of their investigations into perspective. Several appear in marquetry panels of the period. Piero della Francesca gave the first written description of direct geometrical construction of such perspective views of polyhedra. Leonardo da Vinci made skeletal models of several polyhedra and drew illustrations of them for a book by Pacioli. A painting by an anonymous artist of Pacioli and a pupil depicts a glass rhombicuboctahedron half-filled with water.
As the Renaissance spread beyond Italy, later artists such as Wenzel Jamnitzer, Dürer and others also depicted polyhedra of various kinds, many of them novel, in imaginative etchings.
Star polyhedra
For almost 2,000 years, the concept of a polyhedron as a convex solid had remained as developed by the ancient Greek mathematicians.
During the Renaissance star forms were discovered. A marble tarsia in the floor of St. Mark's Basilica, Venice, depicts a stellated dodecahedron. Artists such as Wenzel Jamnitzer delighted in depicting novel star-like forms of increasing complexity.
Johannes Kepler (1571 - 1630) used star polygons, typically pentagrams, to build star polyhedra. Some of these figures may have been discovered before Kepler's time, but he was the first to recognize that they could be considered "regular" if one removed the restriction that regular polytopes must be convex. Later, Louis Poinsot realised that star vertex figures (circuits around each corner) can also be used, and discovered the remaining two regular star polyhedra. Cauchy proved Poinsot's list complete, and Cayley gave them their accepted English names: (Kepler's) the small stellated dodecahedron and great stellated dodecahedron, and (Poinsot's) the great icosahedron and great dodecahedron. Collectively they are called the Kepler-Poinsot polyhedra.
The Kepler-Poinsot polyhedra may be constructed from the Platonic solids by a process called stellation. Most stellations are not regular. The study of stellations of the Platonic solids was given a big push by H. S. M. Coxeter and others in 1938, with the now famous paper The 59 icosahedra.
The reciprocal process to stellation is called facetting (or faceting). Every stellation of one polytope is dual, or reciprocal, to some facetting of the dual polytope. The regular star polyhedra can also be obtained by facetting the Platonic solids. Bridge 1974 listed the simpler facettings of the dodecahedron, and reciprocated them to discover a stellation of the icosahedron that was missing from the set of "59". More have been discovered since, and the story is not yet ended.
Euler's formula and topology
Two other modern mathematical developments had a profound effect on polyhedron theory.
In 1750 the German Leonhard Euler for the first time considered the edges of a polyhedron, allowing him to discover his polyhedron formula relating the number of vertices, edges and faces. This signalled the birth of topology, sometimes referred to as "rubber sheet geometry", and the Frenchman Henri Poincaré developed its core ideas around the end of the nineteenth century. This allowed many longstanding issues over what was or was not a polyhedron to be resolved.
Max Brückner summarised work on polyhedra to date, including many findings of his own, in his book "Vielecke und Vielflache: Theorie und Geschichte" (Polygons and polyhedra: Theory and History). Published in German in 1900, it remained little known.
Meanwhile, the discovery of higher dimensions led to the idea of a polyhedron as a three-dimensional example of the more general polytope.
The twentieth century revival
By the early years of the twentieth century, mathematicians had moved on and geometry was little studied. Coxeter's analysis in The Fifty-Nine Icosahedra introduced modern ideas from graph theory and combinatorics into the study of polyhedra, signalling a rebirth of interest in geometry.
Coxeter himself went on to enumerate the star uniform polyhedra for the first time, to treat tilings of the plane as polyhedra, to discover the regular skew polyhedra and to develop the theory of complex polyhedra first discovered by Shephard in 1952, as well as making fundamental contributions to many other areas of geometry.
In the second part of the twentieth century, Grünbaum published important works in two areas. One was in convex polytopes, where he noted a tendency among mathematicians to define a "polyhedron" in different and sometimes incompatible ways to suit the needs of the moment. The other was a series of papers broadening the accepted definition of a polyhedron, for example discovering many new Regular polyhedra. At the close of the 20th century these latter ideas merged with other work on incidence complexes to create the modern idea of an abstract polyhedron (as an abstract 3-polytope), notably presented by McMullen and Schulte.
Polyhedra in nature
For natural occurrences of regular polyhedra, see Regular polyhedron: Regular polyhedra in nature.
Irregular polyhedra appear in nature as crystals.
See also
| Wikimedia Commons has media related to Polyhedron. |
References
Notes
- 1 2 3 Lakatos, I.; Proofs and refutations: The logic of mathematical discovery (2nd Ed.), CUP, 1977.
- 1 2 Cromwell (1997).
- ↑ Grünbaum 2003
- 1 2 3 4 Grünbaum, B.; "Convex polytopes," 2nd Edition, Springer (2003).
- ↑ Inequalities proposed in Crux Mathematicorum :224, #105 from International Mathematical Olympiad Compendium
- 1 2 3 4 Richeson, D.; "Euler's Gem:The Polyhedron Formula and the Birth of Topology", Princeton (2008).
- ↑ Arvo, James (1991). Graphic Gems Package: Graphics Gems II. Academic Press.
- ↑ Büeler, B.; Enge, A.; Fukuda, K. (2000). "Exact Volume Computation for Polytopes: A Practical Study". Polytopes — Combinatorics and Computation. p. 131. doi:10.1007/978-3-0348-8438-9_6. ISBN 978-3-7643-6351-2.
- ↑ Cundy, H.M. and Rollett, A.P.; Mathematical Models, 2nd Edition, OUP 1961.
- ↑ O'Rourke, Joseph (2008), "Unfolding orthogonal polyhedra", Surveys on discrete and computational geometry, Contemp. Math., 453, Amer. Math. Soc., Providence, RI, pp. 307–317, doi:10.1090/conm/453/08805, MR 2405687.
- ↑ Coxeter, H.S.M.; Regular complex Polytopes, CUP (1974).
- ↑ Pearce, P.; Structure in nature is a strategy for design, MIT (1978)
- ↑ Grünbaum (1994)
Sources
- Cromwell, P.;Polyhedra, CUP hbk (1997), pbk. (1999).
- Grünbaum, B. (1994). "Polyhedra with Hollow Faces". In Tibor Bisztriczky; Peter McMullen; Rolf Schneider; et al. Proceedings of the NATO Advanced Study Institute on Polytopes: Abstract, Convex and Computational. Springer. pp. 43–70. ISBN 978-94-010-4398-4.
- Grünbaum, B.; Are your polyhedra the same as my polyhedra? Discrete and comput. geom: the Goodman-Pollack festschrift, ed. Aronov et al. Springer (2003) pp. 461–488. (pdf)
External links
| Look up polyhedron in Wiktionary, the free dictionary. |
General theory
- Polyhedra Pages
- Uniform Solution for Uniform Polyhedra by Dr. Zvi Har'El
- Symmetry, Crystals and Polyhedra
Lists and databases of polyhedra
- Virtual Reality Polyhedra - The Encyclopedia of Polyhedra
- Electronic Geometry Models - Contains a peer reviewed selection of polyhedra with unusual properties.
- Polyhedron Models - Virtual polyhedra
- Paper Models of Uniform (and other) Polyhedra
Free software
- A Plethora of Polyhedra – An interactive and free collection of polyhedra in Java. Features includes nets, planar sections, duals, truncations and stellations of more than 300 polyhedra.
- Hyperspace Star Polytope Slicer - Explorer java applet, includes a variety of 3d viewer options.
- openSCAD - Free cross-platform software for programmers. Polyhedra are just one of the things you can model. The openSCAD User Manual is also available.
- OpenVolumeMesh - An open source cross-platform C++ library for handling polyhedral meshes. Developed by the Aachen Computer Graphics Group, RWTH Aachen University.
- Polyhedronisme - Web-based tool for generating polyhedra models using Conway Polyhedron Notation. Models can be exported as 2D PNG images, or as 3D OBJ or VRML2 files. The 3D files can be opened in CAD software, or uploaded for 3D printing at services such as Shapeways.
Resources for making physical models
- Paper Models of Polyhedra Free nets of polyhedra
- Simple instructions for building over 30 paper polyhedra
- Polyhedra plaited with paper strips - Polyhedra models constructed without use of glue.
| Fundamental convex regular and uniform polytopes in dimensions 2–10 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Family | An | Bn | I2(p) / Dn | E6 / E7 / E8 / E9 / E10 / F4 / G2 | Hn | |||||||
| Regular polygon | Triangle | Square | p-gon | Hexagon | Pentagon | |||||||
| Uniform polyhedron | Tetrahedron | Octahedron • Cube | Demicube | Dodecahedron • Icosahedron | ||||||||
| Uniform 4-polytope | 5-cell | 16-cell • Tesseract | Demitesseract | 24-cell | 120-cell • 600-cell | |||||||
| Uniform 5-polytope | 5-simplex | 5-orthoplex • 5-cube | 5-demicube | |||||||||
| Uniform 6-polytope | 6-simplex | 6-orthoplex • 6-cube | 6-demicube | 122 • 221 | ||||||||
| Uniform 7-polytope | 7-simplex | 7-orthoplex • 7-cube | 7-demicube | 132 • 231 • 321 | ||||||||
| Uniform 8-polytope | 8-simplex | 8-orthoplex • 8-cube | 8-demicube | 142 • 241 • 421 | ||||||||
| Uniform 9-polytope | 9-simplex | 9-orthoplex • 9-cube | 9-demicube | |||||||||
| Uniform 10-polytope | 10-simplex | 10-orthoplex • 10-cube | 10-demicube | |||||||||
| Uniform n-polytope | n-simplex | n-orthoplex • n-cube | n-demicube | 1k2 • 2k1 • k21 | n-pentagonal polytope | |||||||
| Topics: Polytope families • Regular polytope • List of regular polytopes and compounds | ||||||||||||